V
主页
面向三维视觉的C++参考书籍
发布人
面向三维视觉算法的C++ 重要模块精讲:从零基础入门到进阶,链接:https://ebzbf.xet.tech/s/2n2k7h 本次课程,我们首先会用几讲的时间带大家过一遍C++的基础知识,然后对三维视觉中常用的几个C++模块进行重点讲解,主要有指针、引用、类和对象、宏和模板、STL编程、栈和队列、智能指针,多线程,CMakeList这几个章节,另外会附上足够多的实践案例,也会在课程中给大家讲解面试技巧和面试题。
打开封面
下载高清视频
观看高清视频
视频下载器
基于单张图片的3D人脸重建概述
四旋翼模型与控制基础
如何学习NeRF/3DGS-SLAM?(公开课直播回放)
Open3D与点云处理简介(公开课)
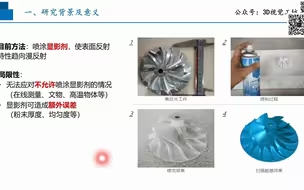
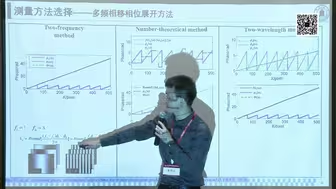
高反光表面三维视觉测量方法
四旋翼无人机-ADRC整体介绍
Occupancy Networks后处理
无需额外训练!SAMPro3D:零样本3D分割一切!
传感器与遥控器校准原理
BEV与Occupancy入门参考资料必看
三维点云系列视频——第一章绪论
ORB-SLAM3基本原理与系统架构
Python之课前准备
零基础入门四旋翼建模与控制无人机 | 数学模型
深度相机概述
ECCV'24开源 | DoubleTake深度估计& 三维重建最强解决方案!
LVI-SAM代码实战与评估
牛津VGG团队最新开源!Flash3D:一张图像重建整个3D场景!通用性超强!
3D打印机,但是无人机打印
SIGGRAPH'2024|RTG-SLAM:基于3DGS的大尺度场景实时三维重建-上篇
大作业|激光-视觉-IMU-GPS融合SLAM算法
无人机|PID算法详解与实战(上)
格雷码辅助实现的三维面形测量:从静态到动态
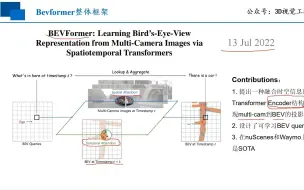
BEVFormer:时空transformer架构
【3D视觉工坊】第十三公开课:基于格雷码结合相移技术的高鲁棒性高效率动态三维面形测量
C++|CmakeLists编写规则
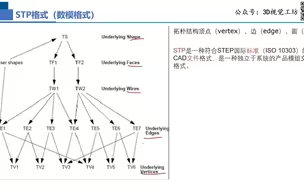
Open3D-三维数据结构
极快跟踪一切!DOT:无惧遮挡!
面向3D视觉的科研方法 | 论文投稿与流程
基于面结构光的高反射物体重建方法关键技术分享[相位偏折术]
三维扫描仪技术概览+高亮透明户外扫描挑战
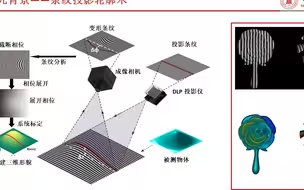
从零搭建一套结构光3D重建系统 [理论+源码+实践]
无人机-PID算法详解与实战
速度提升10倍以上!Depth Anything V2更稳健、精细的单目深度估计
清华最新开源MARS!第一个基于NeRF的自动驾驶开源模拟器!
自驾场景 快速训练!CarDreamer:首个开源世界模型自动驾驶平台
当3DGS遇上可泛化物体位姿估计
单目无监督深度估计综述
自动驾驶中实战基础之3D-2D求解方法
Occupancy占用网络的多维应用探究