V
主页
【3D视觉工坊】第十三公开课:基于格雷码结合相移技术的高鲁棒性高效率动态三维面形测量
发布人
主讲嘉宾: 吴周杰 四川大学三维传感与机器视觉实验室博士生 课程大纲: 1.传统格雷码结合相移技术(3+4+2/静态) 2.互补格雷码编码方法(3+4+1/静态) 3.循环互补格雷码编码方法(3+4/动态) 4.位移格雷码编码方法(3+4/动态) 5.分区间相位展开方法+时间复用格雷码编码方法(3+1/动态)
打开封面
下载高清视频
观看高清视频
视频下载器
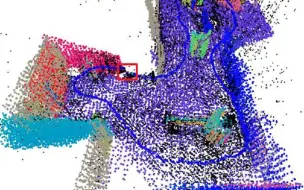
格雷码辅助实现的三维面形测量:从静态到动态
公开课|结构光之相移法+格雷码技术详解
【3D视觉工坊】第八期公开课:立体视觉之立体匹配理论与实战
光学3D测量技术原理及应用
高速结构光三维面形测量方法
高反光表面三维视觉测量方法
ECCV'24开源 完虐COLMAP!百倍加速!ACEZero:全新SfM革新三维重建!
3D视觉应用-现代智慧农业
吊打ORB3!73Hz!南洋理工重磅开源AirSLAM:无惧复杂光照的超强点线视觉SLAM!
激光-视觉-IMU-GPS融合SLAM系列课程-传感器介绍与代表性SLAM解析
三维重建中的网格处理算法分享(公开课)
【3D视觉工坊】第十四期直播 慕尼黑工业大学博士详解室内SLAM中的几何约束
大作业|激光-视觉-IMU-GPS融合SLAM算法
相机标定的基本原理与经验分享
Open3D与点云处理简介(公开课)
107 FPS!开源!结合ICP和3D GS构建最快的稠密SLAM!
【3D视觉工坊】第十五期 嵌入式开发漫漫之路——从小白到技术骨干
LightGlue:最强轻量级特征匹配?
【3D视觉工坊】第十六期 视觉惯性SLAM之多约束扩展卡尔曼滤波
SIGGRAPH'2024|RTG-SLAM:基于3DGS的大尺度场景实时三维重建-上篇
自动驾驶中的视觉感知技术
从零搭建一套结构光3D重建系统 [理论+源码+实践]
深度相机概述
【3D视觉工坊】第七期公开课:图像对齐算法
极快跟踪一切!DOT:无惧遮挡!
视觉快速定位与实时稠密简图简介
点云3D深度学习模型与实践
重磅开源!连你的微表情都可以轻松还原!SMIRK超强3D面部重建技术!
PID控制器原理讲解
(公开课)视觉SLAM原理与ORB-SLAM3系列算法
【3D视觉工坊】第四期公开课:求职经验分享
双目相机标定基础及标定实战
无需额外训练!SAMPro3D:零样本3D分割一切!
GS-SLAM:具有3D高斯溅射的稠密视觉SLAM
图宾根大学最新提出 | 基于3D高斯的高效紧凑的三维场景表面重建技术
Go!最新NeRF和SLAM结合开源方案!超越NICE-SLAM和DROID-SLAM!
当MVS遇上Gaussian MVSGaussian 快速、可泛化的高斯重建框架!-上篇
LVI-SAM|视觉-惯性子系统(VIS)代码精读
让NeRF动起来!PhysGaussian:生成任何物体的真实运动!
清华最新开源万能3D分割一切!