V
主页
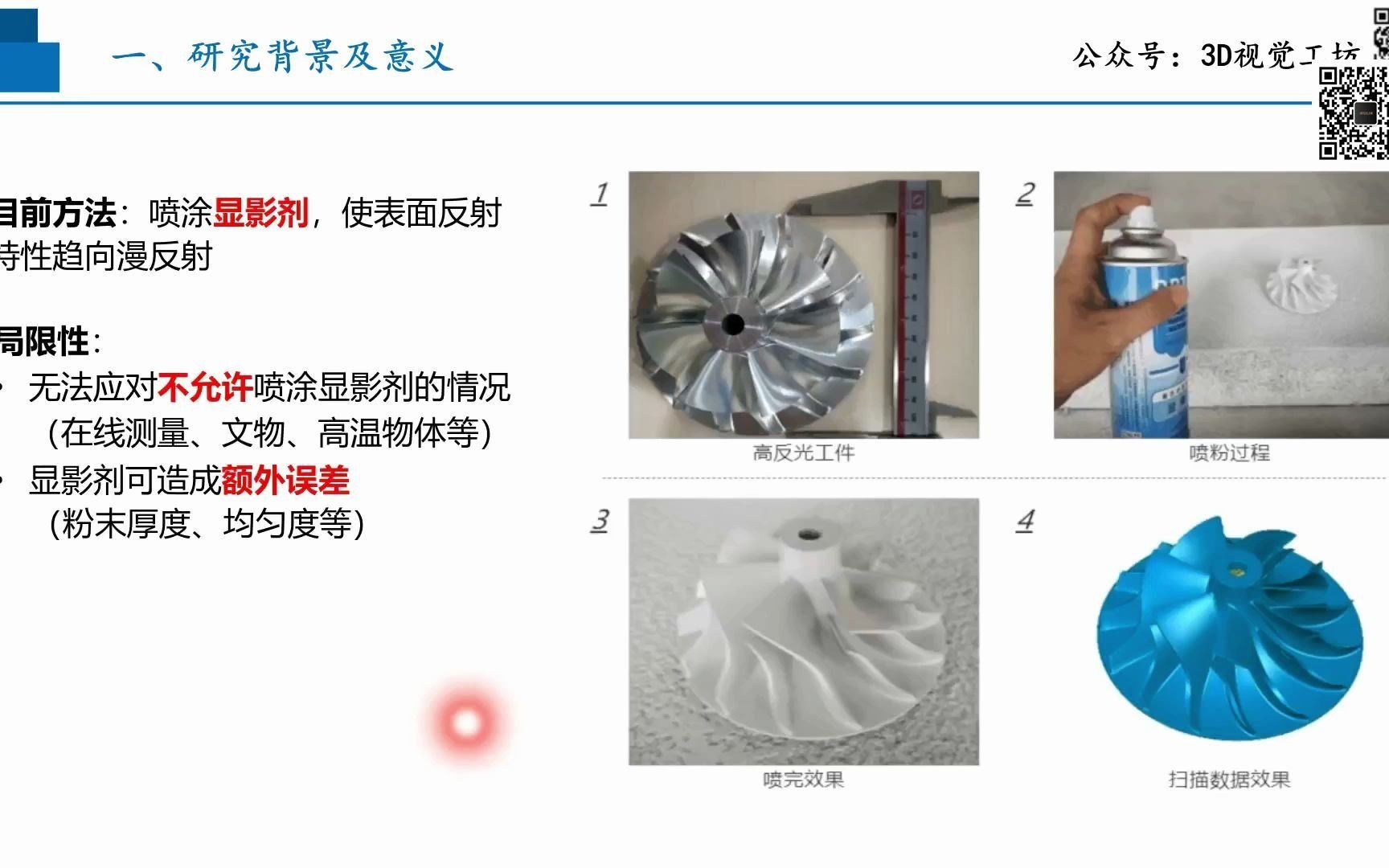
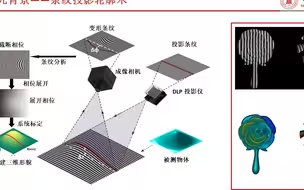
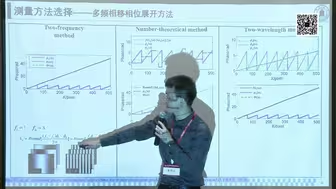
高反光表面三维视觉测量方法
发布人
主讲嘉宾:张琼怡,北京航空航天大学仪器科学与光电工程学院在读硕士,研究方向为结构光投影三维测量,高反光表面三维测量。 课程大纲: 1、研究背景及意义 2、高动态范围技术 3、相位偏折术 4、总结
打开封面
下载高清视频
观看高清视频
视频下载器
【3D视觉工坊】第十三公开课:基于格雷码结合相移技术的高鲁棒性高效率动态三维面形测量
高速结构光三维面形测量方法
面向三维视觉的C++参考书籍
ECCV2024 | 训练45秒,渲染300+FPS!MVSGaussian:高效且可泛化的混合高斯渲染方法
口腔检查,用尺子测量长度
提速199倍!LangSplat:清华&哈佛发布三维语义Gaussian Splatting
ICCV 2023|第一种稀疏的仅视觉的交叉视图定位方法!
Nature正刊开源!突破低延迟自动驾驶视觉感知!
(初中物理)—温度测量—温度计
光学3D测量技术原理及应用
3D视觉应用-现代智慧农业
自动驾驶中的视觉感知技术
图宾根大学最新提出 | 基于3D高斯的高效紧凑的三维场景表面重建技术
三维扫描仪技术概览+高亮透明户外扫描挑战
3DGS SLAM最新SOTA | 使用视觉、深度和惯性测量进行SLAM的多模态3DGS
相机标定的基本原理与经验分享
戴森机器人实验室发布SuperPrimitive:三维重建&视觉里程计&深度补全轻松搞定!
大作业|激光-视觉-IMU-GPS融合SLAM算法
格雷码辅助实现的三维面形测量:从静态到动态
如何处理视觉SLAM长期定位中的外观变化和轨迹漂移?
面向三维视觉的C++,包含哪些模块
华为最新工作:RoadMap:用于自动驾驶视觉定位的轻量化语义地图
自驾场景 快速训练!CarDreamer:首个开源世界模型自动驾驶平台
让NeRF动起来!PhysGaussian:生成任何物体的真实运动!
三维点云系列视频——第一章绪论
牛津VGG团队最新开源!Flash3D:一张图像重建整个3D场景!通用性超强!
什么?不做时间同步也可以实现LiDAR-相机三维重建?
香港大学发表超强无人机实时避障算法:以后无人机再也不怕撞了!
重磅开源!连你的微表情都可以轻松还原!SMIRK超强3D面部重建技术!
面向3D视觉的科研方法 | 论文投稿与流程
自动驾驶中实战课之Lidar与IMU的同步实战
自动驾驶实战课之多相机间的同步实战
SIGGRAPH'2024|RTG-SLAM:基于3DGS的大尺度场景实时三维重建-上篇
3DGS进化,高效高质量的GaussianPro来袭!
中国科大&HKUST 基于3D高斯和形成模式采样的文本到三维场景生成方法
【3D视觉工坊】第八期公开课:立体视觉之立体匹配理论与实战
3D重建革命!零预训练10倍 速度360°重建新方法 ZeroRF
顶刊论文:LineTR:用于视觉定位的上下文感知线描述符
这绝对是质量最高的单目深度估计开源方案!
CVPR2023开源 无纹理和重复纹理也能实现鲁棒的特征匹配!