V
主页
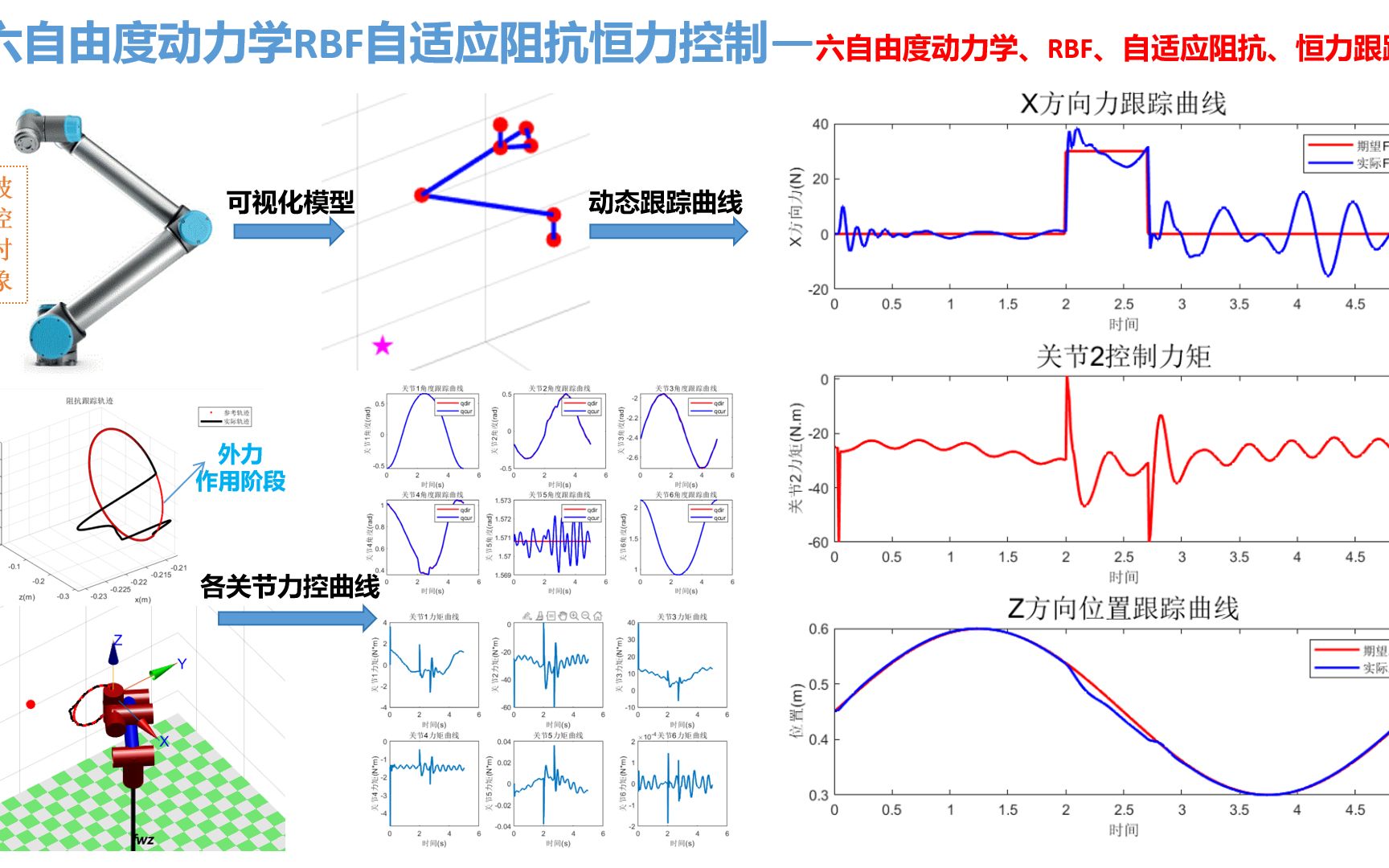
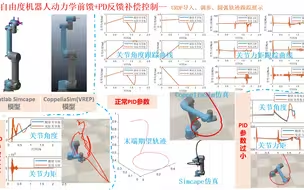
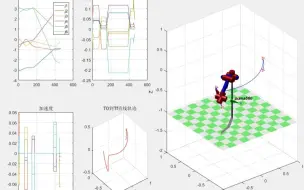
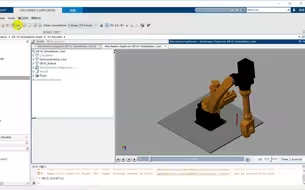
六自由度动力学RBF自适应阻抗恒力控制
发布人
六自由度动力学RBF自适应阻抗恒力控制 主要完成的工作如下: 1.建立六自由度机械臂动力学模型,采用力矩控制机械臂的轨迹; 2.建立阻抗模型,采用采用阻抗控制跟踪恒力,RBF自适应调节阻抗控制器参数; 3.跟踪给定轨迹,并施加阶段性恒力干扰; 4.基于计算力矩,进行接触力估计,获得力跟踪曲线; 5.完成算法仿真。 说明:视频种位置跟踪的动态曲线存在绘图错误,请忽略该图。
打开封面
下载高清视频
观看高清视频
视频下载器
基于导纳控制ur机械臂末端实时恒力保持
7自由度机器人Franka Panda 变阻抗控制
机器人阻抗控制(Impedance Control of Robot Motion)
六自由度机械臂动力学滑模控制
自适应阻抗控制
【史上最强机械臂教程】机械臂运动学、轨迹规划和动力学控制仿真
【机器人控制】基于模型不确定补偿的 RBF 网络双机械臂自适应控制
机械臂阻抗力跟踪、阻抗MBK参数对力跟踪效果影响
六自由度机械臂动力学轨迹跟踪控制
工业六轴机械臂阻抗控制
一起用Matlab从零手写六轴机械臂正逆解和轨迹规划
基于自适应变阻抗的LBR/iiwa末端接触力跟踪
基于粒子群的六自由度机械臂能量最优轨迹规划
【机器人控制】基于模型不确定补偿的 RBF 网络单机械臂自适应控制
【附源码】MATLAB 中的简单阻抗控制
阻抗控制的学习与规划
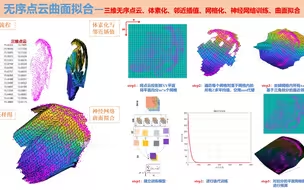
无序点云曲面拟合—三维无序点云、体素化、邻近插值、网格化、神经网络训练、曲面拟合
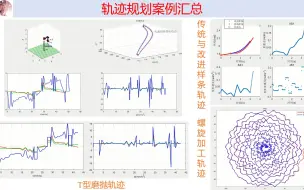
轨迹规划案例汇总
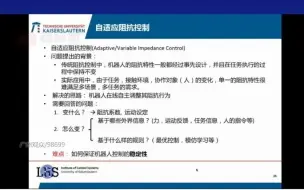
自适应阻抗
编队集群控制
姿态控制
示教展示机器人碰撞检测过程 — 最直观的方式看懂碰撞检测
机器人零空间、全身控制、任务级优先、末端定位姿控制方法,从曲柄滑块、六自由度、七自由度机器人到车载机械臂的打怪升级之路
机器人阻抗控制— 动力学建模、试探抓取目标物、控制周期影响展示
基于倒立摆模型的双足机器人爬楼梯运动控制
【simulink机器人仿真】机器人阻抗控制——定点阻抗、轨迹跟踪阻抗
基于定阻抗参数控制的机械臂轨迹跟踪学习
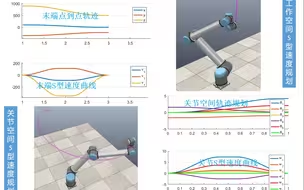
UR机器人S型轨迹规划matlab、vrep联合仿真
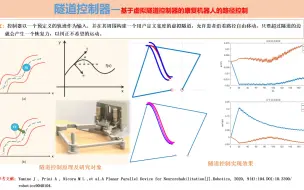
隧道控制器基于虚拟隧道控制器的康复机器人的路径控制
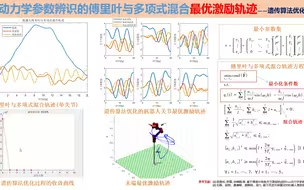
动力学参数辨识的傅里叶与多项式混合最优激励轨迹
基于零空间的任务级优先控制wbc、ROS、matlab
分解控制
【Matlab】控制算法——导纳控制
改进RRT路径规划与轨迹规划
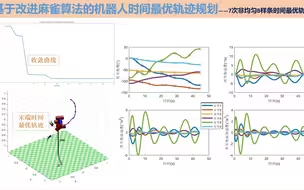
基于改进麻雀算法的机器人时间最优轨迹规划——7次非均匀B样条轨迹
【机器人控制】机器人机械臂任务空间自适应神经网络控制
四足机器人步态仿真
机器人速度前瞻控制算法
一种快速跟踪末端路径的力位混合阻抗控制方法
机器人连续位姿同步插值轨迹规划——对数四元数、b样条曲线、c2连续位姿同步规划