V
主页
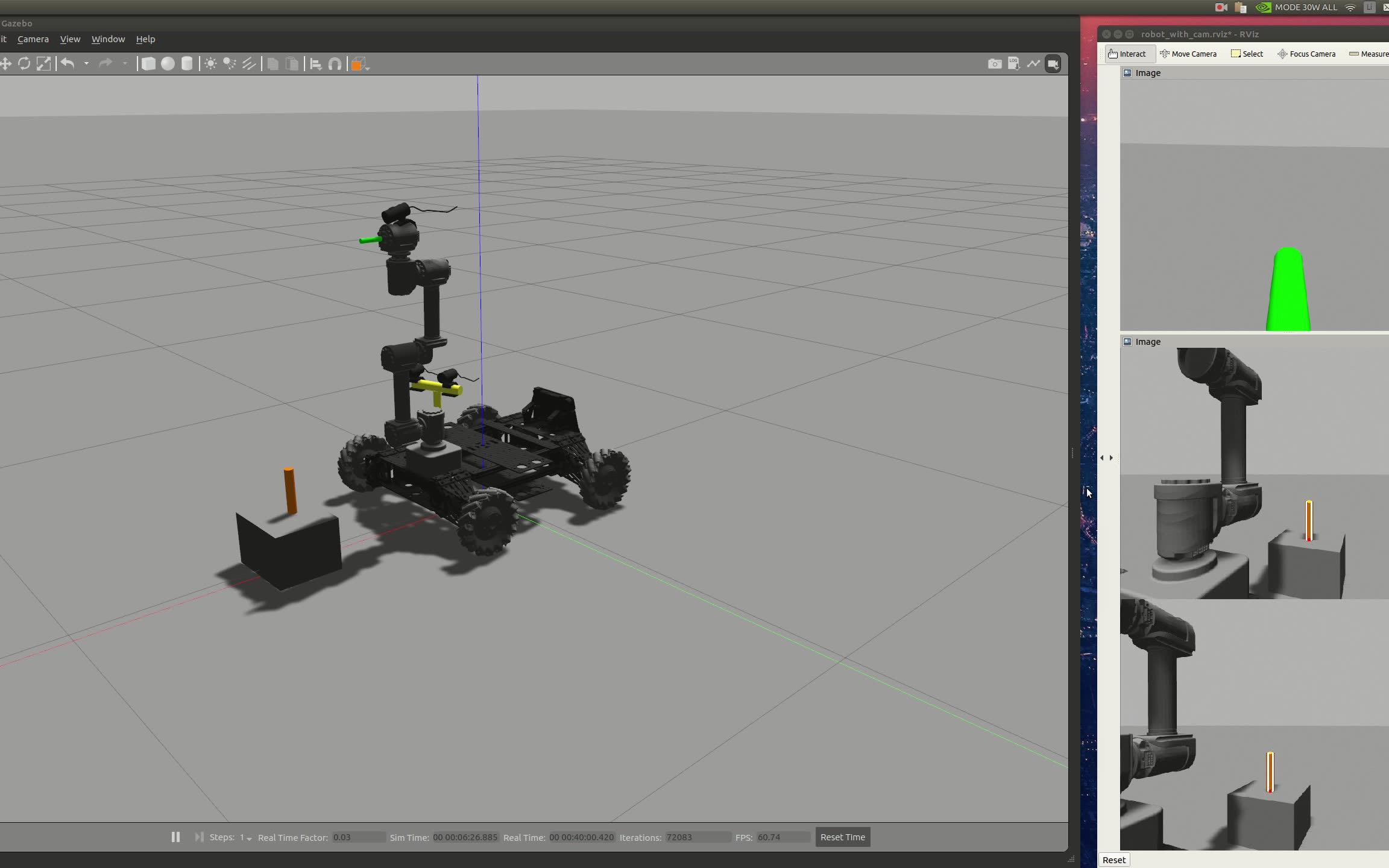
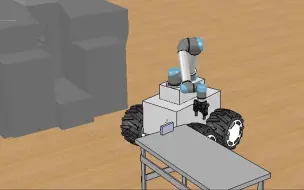
在ROS_Gazebo中搭建移动机械臂仿真平台
发布人
Gazebo模型
打开封面
下载高清视频
观看高清视频
视频下载器
【noetic+ur5+robotiq85+gazebo】ros机械臂 opencv 抓取仿真
移动机械臂底盘路径跟踪
基于ROS搭建仿真环境——A ROS based Open Source Simulation Environment
移动机械臂运动学仿真 ROS+rviz (地盘是全向车,简化为4个普通轮)
gazebo仿真ros小车路径规划与避障
没有机器人,无法学习机械臂?在Gazebo中进行进行UR机械臂仿真
移动底盘+视觉抓取,六轴机械臂配合二指夹爪完成夹取放置。
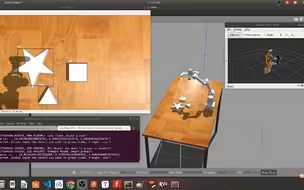
仿真环境中进行机械臂抓取
ROS用RVIZ运行仿真机械臂
基于强化学习的机械臂目标位姿设计(仿真ROS Gazebo)
ROS2+Gazebo双UR5e机械臂抓取
【附源码】在 ROS Gazebo 模拟中使用 UR5 机器人进行力控制装配
基于ROS的工业机器人视觉装配仿真
UR5机械臂视觉抓取gazebo仿真
Gazebo仿真环境搭建
开源!基于树莓派4B开发的ROS机械臂,内置AI视觉和MoveIt运动学算法 ,实现人工智能手眼合一、移动跟随、智能分拣、智慧仓储系统,ArmPi FPV
Rviz+Gazebo联合仿真机械臂运动
《 MoveIt运动控制来了! 在抓取仿真平台上代码驱动UR抓取绝不止于想象!》
70分钟快速入门Gazebo机器人仿真
全向移动机械臂真空气泵拾取物块,基于图像无标定视觉伺服
基于机器人操作系统(ROS)和Gazebo仿真平台的机械臂强化学习抓取算法研究
基于ggcnn的ROS机器人Gazebo仿真抓取
搭载机械臂的移动小车仿真 末端控制 机械臂抓取 键盘控制【youBot二次开发】【Webots】
ROS小车加机械臂
抓取不止!Ubuntu 18.04下UR5机械臂搭建Gazebo环境|开源分享
遨博机械臂ROS melodic开发环境部署
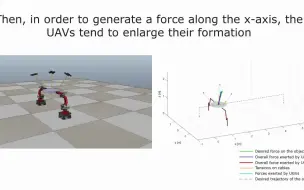
ICRA2021会议论文:多移动机械臂-多无人机的协同搬运
INNFOS with Ros Moveit 9月初整合起来的,看看就行
移动机器人和机械臂复合的智能机器人开发与实践
Gazebo仿真贴图零基础实战第1期 从SolidWorks模型到Gazebo仿真 超详细教程 TianbotMini迷你机器人平台 张宇星YYDS
【移动机械臂】Picking Up Parts Using Mobile Manipulators Under Perception Uncertainty
使用Gazebo仿真6轴机械臂,MoveIt规划轨迹并在Rviz中显示
【开源课程】5分钟搞定机械臂开发和仿真环境,MoveIt!
ROS机械臂教程《如何基于MoveIt开发一款机械臂》
【ROS机械臂入门教程】第5讲-Gazebo仿真or控制真实机器人
ros中ur5机械臂动态物体抓取demo
【ROS机械臂入门教程】第2讲-从机械臂视角看ROS
XJU移动机器人仿真-第1期 环境搭建(gazebo模型 插件 urdf rviz)
在GAZEBO仿真中用Blender搭建属于你自己的模型
基于Moveit与yolov5的gazebo仿真(开源填坑)