V
主页
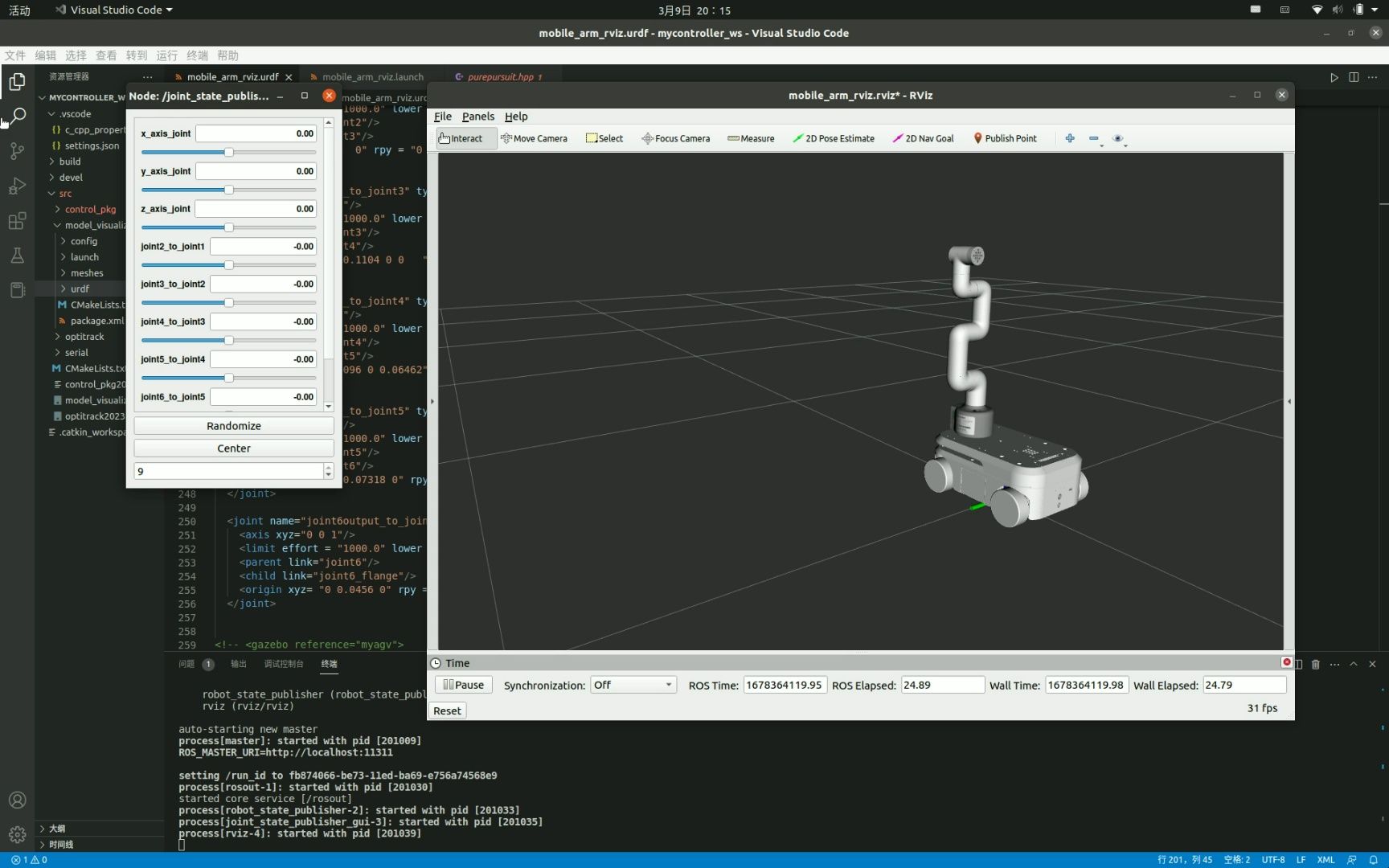
移动机械臂运动学仿真 ROS+rviz (地盘是全向车,简化为4个普通轮)
发布人
ros+rviz进行运动学仿真,第一步先将URDF模型进行可视化显示,便于后续的算法仿真。继续加油,还有好多工作要做。未完待续...... 采用的大象机器人的github提供的模型(myAGV+280M),它家 臂+车 结合这块的URDF和rviz仿真做的不好,我搞了好久才正确拼合并正确地进行rviz显示,主要是给车体增加三个自由度,即两个平移+一个旋转。 大象机器人https://github.com/elephantrobotics
打开封面
下载高清视频
观看高清视频
视频下载器
人形机器人足底机械结构设计
通过优化理论指导设计双足以达到控制和任务的最优
MuJoCo 仿真 案例欣赏
Part 2 - How to Solve Inverse Kinematics of a 4 Leg Robot
Part 3 (Final) - How to Solve Inverse Kinematics of a 4 Leg Robot
Part 1 - How to Solve Inverse Kinematics of a 4 Leg Robot
人形机器人腿部结构 基于 4DoF 球面并联机构
一天射3次到底会怎样?
【Python】冗余机械臂——逆运动学
qpSWIFT : A Real-time Sparse Quadratic Program Solver for Robotic Applications
人形机器人腿部机械结构设计 !很简单,有手就行!论文在简介
(IROS 2023) 浮动基座机器人本体感受外部力矩学习及其在类人运动中的应用
CMU 开源四足机器人运动控制及仿真代码 Quad-SDK
腿式机器人的多接触惯性估计与定位 [论文在审稿中]
Inverse-Dynamics MPC via Nullspace Resolution (IROS'23 Presentation)
Orthrus: A Dual-arm Quadrupedal Robot for Mobile Manipulation and Entertainment
真牛!这个人形机器人吊打很多厂家的“产品”
(submit to IROS 24) A Single-Leg Robot that Mimics the Human Leg and Toe
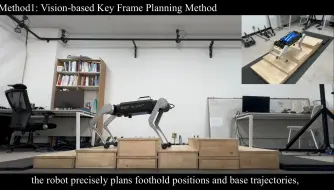
四足运动:用三种不同的方法在崎岖地形上行走
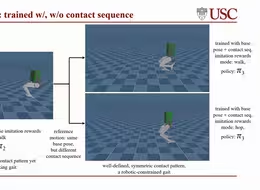
基于学习的多模式双足运动和隐式转换:一种多功能的策略方法
Dynamic Planning, forwards, backwards, and sideways on Stairs
人形机器人灵巧手臂最新成果
MPC and RL, two different roads to legged locomotion, and that's OK
[ ETH RSL ] mANYpulator – 移动操纵 (Martin Wermelinger)
双足机器人步态生成 MATLAB and Simulink
基于分层优化的四足机器人全身运动控制搬运重物
CasADi 3.6 tutorial (C++ Matlab Python)
ETH 最新Science Robotics基于学习的轮腿机器人自主导航和运动
令人惊叹的步态和控制 无比丝滑 Boston Dynamics Spot
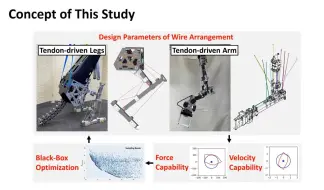
(RA-L 2024) Design Optimization of Wire Arrangement for Tendon-driven Robots
[IROS 2022] 四足机器人通过端到端学习运动和局部导航来掌握高级技能
人形机器人火爆发展:2025即将量产!
你感觉到机器人的恐怖如斯了吗?未来已来
单腿站立 轻轻松松 Atlas KarateKid
MimicTouch:利用多模式人类触觉演示实现丰富的接触式操作
人形机器人 手指机械结构
PACC:一种使用 MPC 与四足机器人进行高负载协作搬运的被动臂方法
Online trajectory optimization for dynamic aerial motions of a quadruped robot
KAIST Hound, a Quadruped Robot 100m World Record
ghost robotics 四足机器人