V
主页
京东 11.11 红包
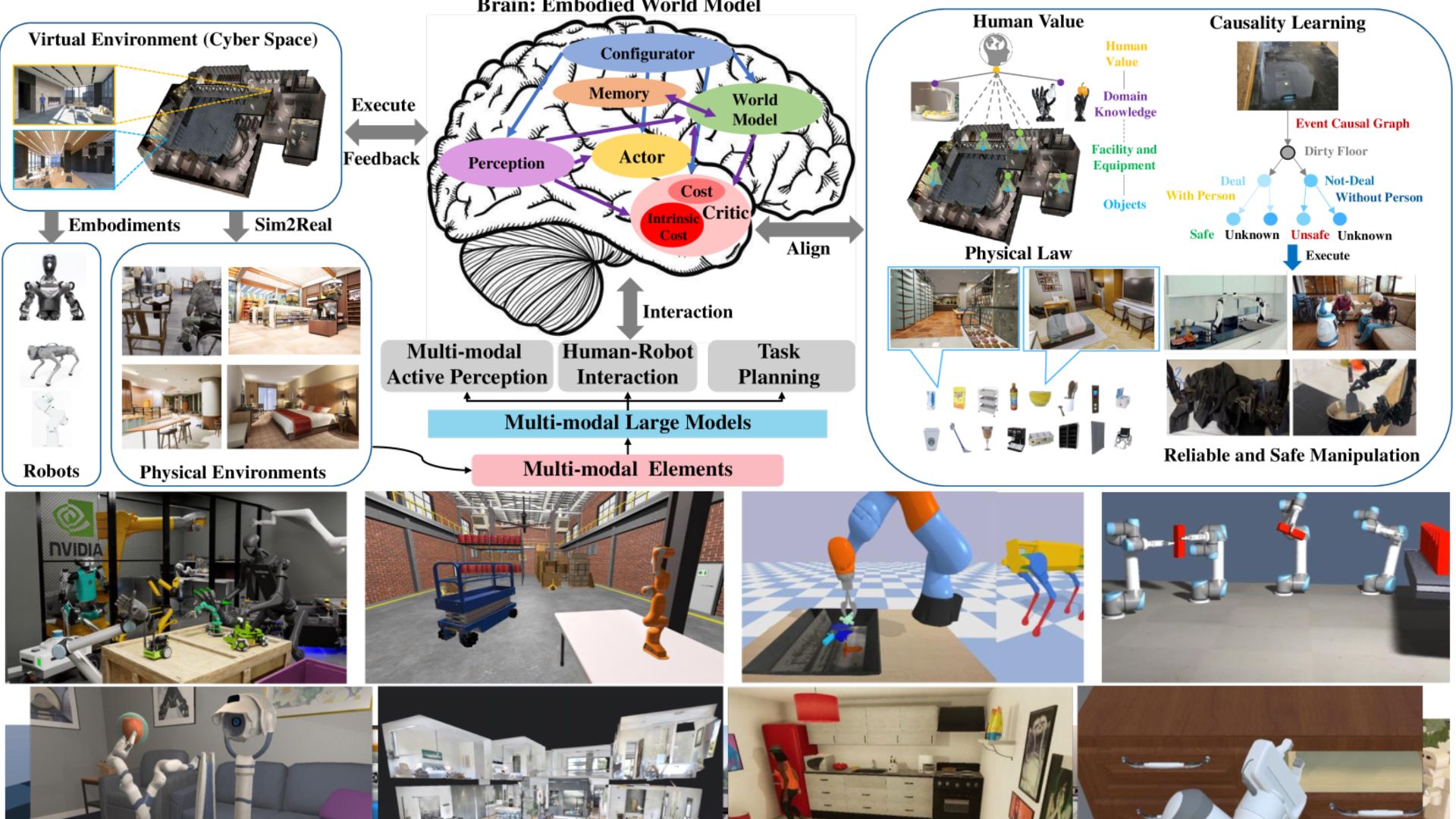
鹏城实验室、中山大学 | 深度调研解析将近400篇文献,首篇多模态大模型时代的具身智能【综述】重磅推出
发布人
来自中山大学和鹏城实验室的研究团队调研了近400篇文献,从多个维度对具身智能的研究进行了全面解析。 标题:Aligning Cyber Space with Physical World: AComprehensive Survey on Embodied Al 链接:https://arxiv.org/pdf/2407.06886
打开封面
下载高清视频
观看高清视频
视频下载器
视觉SLAMVIO开源代码解析-DSO
关于《多模态大型语言模型》的 最新综述,从对比到分析再到 不足,为其发展提供宝贵意见
清华最新综述:第一个专门针对NeRF在自动驾驶领域应用的调查,旨在弥补当前文献中存在的明显空白
NTU开源 | AirSLAM:高效且 光照稳健的点线视觉SLAM系统 嵌入式运行速度可达40HZ
【LLM前沿】6小时精讲四大多模态大模型CLIP BLIP VIT MLLM及对话机器人办公助手!绝对的通俗易懂的大模型应用教程!
多模态信息感知的SLAM | 吴毅红
我国高校今年发表的五篇关于无人机的创新性研究成果,每篇都是被顶刊录入的存在!
中国科大新作 | 基于3D高斯的多模态融合在无界场景中的定位和重建
Science Robotics | 无需外部传感器,通过关节力矩传感技术即可实现"触摸即命令"
无人机集群的去中心化和分布式状态估计和协同定位与建图-徐浩/香港科技大学博士
来自中科院关于3DGS进展的最新综述,该团队的本次调查旨在帮助初学者快速进入该领域,并为经验丰富的研究人员提供全面的概述
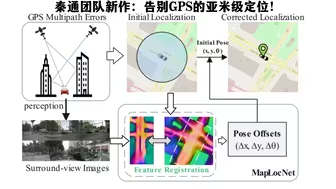
IROS24新作 | 上交大秦通团队,MapLocNet:实现自动驾驶新突破 告别GPS的亚米级定位!
重磅出炉!高翔《自动驾驶与机器人中的SLAM技术》新书配套课程发布
异构机器人无GPS协作!宾大重磅推出SlideSLAM:实时去中心化的度量语义SLAM
端-云协同的视觉定位与重建及应用 | 章国锋
ECCV'24 | Gaussian Grouping解决3DGS的对象级场景理解问题,实现3D场景任意分割和编辑
跨智能体模仿学习的机器人连续演化模型-刘星昱/卡内基梅隆大学博士后
当机器人遇到遮挡:IROS'24最新佳作揭秘「如何在视觉盲区保持精准人体追踪
算法岗的招聘现状与未来——移动机器人与自动驾驶专场
基于深度学习的三维重建与位姿估计系统设计 | 孙佳明
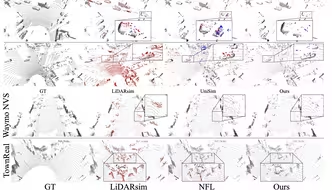
CVPR'24 Highlight 开源,DyNFL:使用NeRF对动态激光雷达场景仿真
研一在读,导师让学自动驾驶环境感知?有这45篇经典论文就够了!
关于3DGS的最新综述,3D重建与新型视图合成
自动驾驶规划控制概况
首个关于NeRF与3DGS如何重塑SLAM的最新综述,旨在为初学者和资深专家提供重要的指南
OpenAR 基于计算机视觉的自动化游戏脚本框架
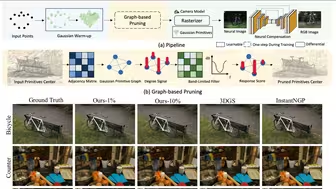
告别3DGS算法,开源SUNDAE,实现内存效率与图像质量的双赢
ECCV'2024 北航、极氪领衔 | FSD-BEV:大幅度提升基于视觉的3D目标检测算法性能,实现感知新SOTA!
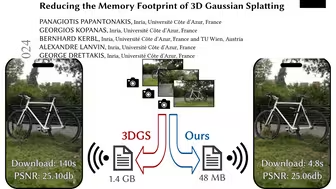
3DGS官方团队新作!减少3DGS内存占用,可达29.87倍压缩,渲染速度提高1.7倍!
浙大最新开源!HVOFusion:使用混合体素八叉树进行增量网格重建
NeRF系列公开课01 | 基于NeRF的三维内容生成
首篇统一户外+室内3D检测框架推出,CVPR2024 | UniMODE:统一单目3D物体检测
清华叉院、理想提出DriveVLM,视觉大语言模型与自动驾驶融合,以提升自动驾驶能力
第四次工业革命已悄然兴起,那么它的标志性产业会是什么呢?
SIGGRAPH'24 | 逆天!利用分层3D高斯表示,实时渲染超大规模场景!
高翔SLAM报告:开阔高动态区域的激光融合定位
移动机器人运动规划方法分类
机器人革命来了!法国开源“模块化人形机器人”Reachy!
3D Gaussian Splatting在自动驾驶中的应用——建模动态城市场景
视觉状态估计及其在无人系统中的应用