V
主页
京东 11.11 红包
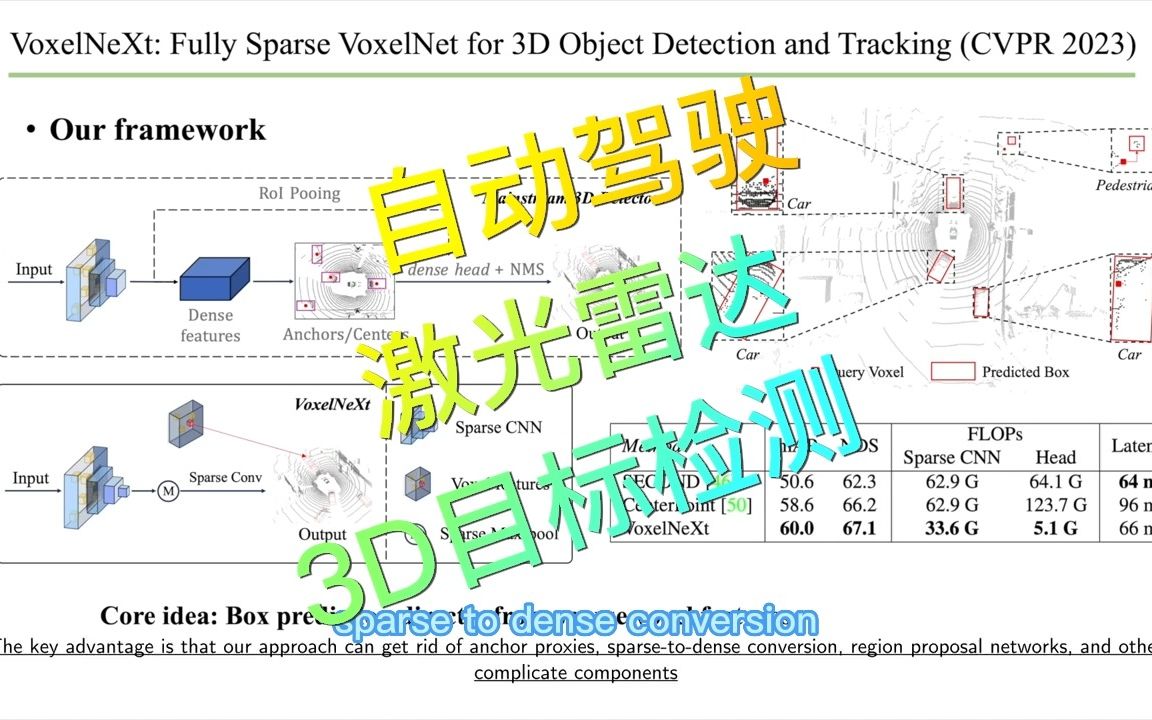
CVPR 2023:VoxelNeXt:用于3D目标检测和跟踪的全稀疏新框架!
发布人
稀疏体素特征需要由密集的预测头进行加密和处理,这不可避免地需要额外的计算。本文提出了用于完全稀疏3D目标检测的VoxelNext。它是一个优雅而高效的框架,不需要稀疏到密集的转换或NMS后处理。 自动驾驶之心官网正式上线了:www.zdjszx.com(海量视频教程等你来学) ①YOLOv3~YOLOv8/YOLOX/PPYOLO系列全栈学习教程 ②国内首个BEV感知全栈学习教程(纯视觉+多传感器融合方案) ③多传感器融合中的毫米波雷达-视觉融合感知全栈教程 ④Lidar+Radar+Camera+IMU离线/在线近20+标定方案教程等你来学 ⑤模型部署实战:基于TensorRT的CNN/Transformer/检测/BEV模型四大部署代码+CUDA加速 ⑥规划控制理论&实战课程:PID、LQR、MPC全掌握 课程咨询联系AIDriver004,科研合作及辅导联系AIDriver002。 更多往期直播PPT尽在【自动驾驶之心】知识星球!星球内还有众多大佬等你挑战!
打开封面
下载高清视频
观看高清视频
视频下载器
CVPR 2023 | Mask DINO:面向检测和分割的统一Transformer最强框架!
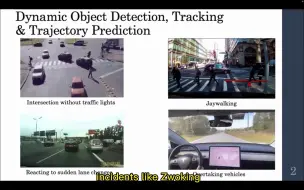
基于多传感器的自动驾驶动态目标检测、跟踪和轨迹预测
UncertaintyTrack: 利用检测和定位不确定性进行多目标跟踪
BEV-SAN:通过切片注意力网络实现精确的BEV 3D检测
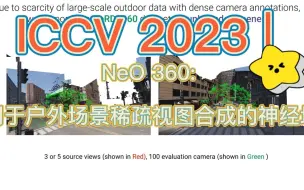
ICCV 2023 | NeO 360: 用于户外场景稀疏视图合成的神经场
2022最新!基于激光雷达的3D目标检测综述(超全数据集和SOTA方法汇总)
常考题!目标跟踪中如何定义最优关联匹配?
聊一聊多传感器目标跟踪中的最近邻匹配问题
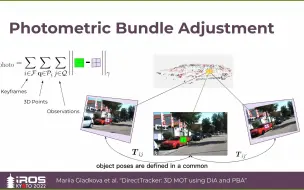
最新3D多目标跟踪方法DirectTracker:基于直接图像对齐和光度学束调整的3D多目标跟踪(IROS2022)
自动驾驶 3D LiDAR目标跟踪技术实现细节大揭秘!
最新!DiscoNet:稀疏遮挡Lidar点云下的鲁棒3D感知方法!
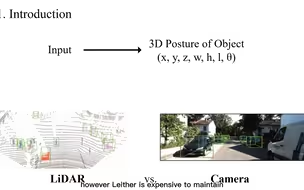
传感器融合教程 Part 1 - 3D目标检测概述(3D Object Detection Overview)
太详细了!多传感器融合的策略和方法
自动驾驶如何学好C++?
大火的BEVFusion算法详解
NeRF-RPN:第一个有效的基于NeRF的目标检测框架
ECCV2022 | 3D目标检难例挖掘首篇工作!(Wamyo出品,改进3D检测中的类内长尾)
终生SLAM框架!BioSLAM:用于一般地点识别的仿生终身记忆系统
自动驾驶多传感器数据融合(4):多目标跟踪算法
ECCV2022 workshop | 自动驾驶中的自监督学习part1(数据处理、深度估计、3D检测/跟踪、SLAM、定位等!)
自动驾驶多传感器数据融合(3):单目标跟踪算法
来听大牛说!赵行老师在CVPR 2023年自动驾驶研讨会上发表的演讲
CVPR2023最新!TBP Former:BEV下以视觉为中心的自动驾驶中的联合感知和预测网络
【地平线×自动驾驶之心】ICCV 2023最新中稿的端到端自动驾驶框架—VAD!
传感器融合教程 Part 4 - 3D目标检测和传感器融合流程(3D Object Detection and Sensor Fusion pipeline)
WACV 2022 | SIDE:具有结构感知实例深度估计的基于中心的立体3D目标检测器
看到了这个视频,彻底搞懂了PETR算法!
毫米波雷达视觉算法CRAFT,这次彻底理解了!
以特斯拉为案例:自动驾驶仿真框架分析(下,仿真应用/2D检测/3D检测/车道线)
看完缓解了我的技术焦虑!自动驾驶的产线标定以及标定间标定方法
超全干货 | 自动驾驶中的传感器融合:前融合+后融合+特征级融合(方法与策略)
搞懂了!原来激光雷达和相机的内外参是这样标定的
CVPR'23 | OCTraN:非结构化交通场景中的3D占用卷积Transformer网络
RangeDet:基于Range-View的激光雷达3D目标检测网络(ICCV2021)
端到端算法是什么?自动驾驶领域是怎么做的?
CVPR 2023 | 从几何匹配一致的角度重新思考光流问题
相机和激光雷达融合的多车辆跟踪demo
为什么自动驾驶离不开模型部署?
从0到1!彻底搞懂BEVFormer算法原理
ICRA2023 | 激光雷达相机内外参联合标定方案!