V
主页
传感器融合教程 Part 1 - 3D目标检测概述(3D Object Detection Overview)
发布人
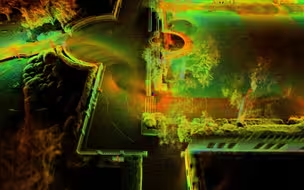
视频链接:https://www.youtube.com/watch?v=hXpXKRnnM9o 传感器融合(LiDAR和相机融合)系列课程,第一部分:3D目标检测概述 课程笔记:https://github.com/itberrios/CV_tracking/blob/main/kitti_tracker/1_kitti_object_detection_lidar.ipynb 在本教程中,作者将深入研究KITTI数据集,并使用早期传感器融合或早期融合在3D中检测目标,其目的是融合来自多个来源的原始数据,然后执行检测。另一方面,后期融合涉及首先检测对目标,然后融合检测结果。在这种情况下,作者将执行一个改进的融合,在这里作者检测相机图像中的目标,然后将其中心与激光雷达数据融合以获得深度。
打开封面
下载高清视频
观看高清视频
视频下载器
传感器融合教程 Part 4 - 3D目标检测和传感器融合流程(3D Object Detection and Sensor Fusion pipeline)
2022最新!基于激光雷达的3D目标检测综述(超全数据集和SOTA方法汇总)
3D目标检测的数据标注/算法讲解/训练调优全系列闭环
CVPR 2023 | BEVHeight:基于视觉的道路3D目标检测的鲁棒框架
自动驾驶中的多传感器融合状态估计如何建模?
自动驾驶中的多传感器融合有什么优势?如何快速入门到进阶?
激光雷达3D目标检测算法有哪些?怎么分类的?
【ICRA 2023 | 首篇研究LiDAR基础设施部署的工作!作者亲自带你玩转传感器部署策略】第3节:车路协同场景激光雷达部署策略优化方法
【深信科创联合制作】仿真数据的一百种玩法 | 基于Carla传感器的仿真数据增强实战来了!
多传感器融合!BEV感知融合算法介绍
自动驾驶多传感器数据融合(4):多目标跟踪算法
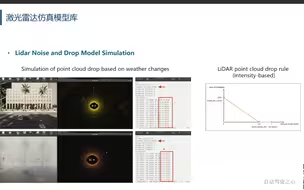
【ICRA 2023 | 首篇研究LiDAR基础设施部署的工作!作者亲自带你玩转传感器部署策略】第2节:高一致性传感器仿真模型库
超越Lidar?聊一下4D Radar在自动驾驶中的优势和应用!
自动驾驶多传感器数据融合(2):IMU和GPS的融合定位
超全干货 | 自动驾驶中的传感器融合:前融合+后融合+特征级融合(方法与策略)
【CVPR2023】 自动驾驶场景下理解BEV目标检测的鲁棒性
自动驾驶多传感器数据融合(1):什么是多传感器融合?
特斯拉的4D自动标注详解!为什么无标注数据work?
ECCV2022 | 3D目标检难例挖掘首篇工作!(Wamyo出品,改进3D检测中的类内长尾)
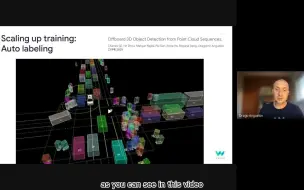
最新!DiscoNet:稀疏遮挡Lidar点云下的鲁棒3D感知方法!
OmniDet:环视鱼眼多任务感知网络(深度估计、视觉里程计、语义和运动分割、目标检测和镜头污染检测)
【IROS2022】MPC-PF:使用势场的自动驾驶动态目标的社会交互感知轨迹预测
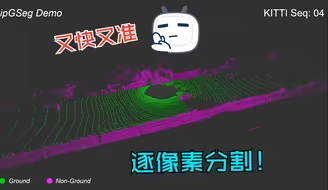
又快又准!一种基于图像表示的快速精确的LiDAR地面分割算法
CVPR 2022 | 3D目标检测的体素场融合(港中文&港大)
MetaBEV:解决BEV检测和地图分割的传感器故障新方案
毫米波雷达视觉算法CRAFT,这次彻底理解了!
UncertaintyTrack: 利用检测和定位不确定性进行多目标跟踪
计算效率提升20% | 直接LiDAR-惯性里程计:具有连续时间运动校正的轻量级LiDAR-惯性里程计
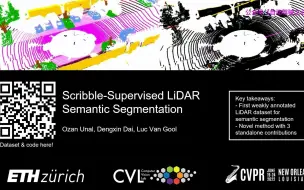
CVPR2022 oral | 弱监督Lidar点云分割SOTA!8% 标注数据下达到 95.7% 的全监督性能!
大火的BEVFusion算法详解
3D目标检测底层革新被ScartterFormer玩明白了!支持算子定制,实现灵活交互(ECCV2024 )
香港理工最新 !SLAMesh:激光雷达传感器的SLAM系统,实时构建和利用网格
实时3D目标检测 | 利用稀疏表示来提高嵌入式系统上3D目标检测模型的运行速度!
Nuscenes、KITTI等多个BEV开源数据集介绍!
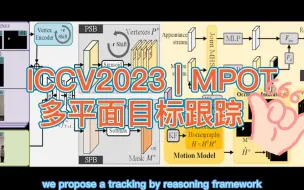
ICCV2023 | MPOT:多平面目标跟踪
SLAMesh: 基于Mesh地图的实时LiDAR定位与Mesh建图方法分享
CVPR2022 | SHIFT:当前自动驾驶最大的多任务合成数据集(雾天/雨天/雪天,检测、分割、深度图、实例分割、光流)
ICRA2022 | 基于图的多传感器融合在自动施工机器人一致定位中的应用
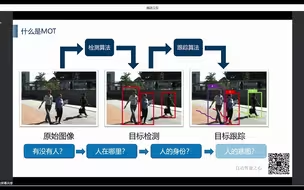
多目标跟踪世界冠军和大家一起聊聊MOT的模块与优化方向!
M-LIO:提升传感器信号丢失容忍度的多激光雷达和多IMU里程计