V
主页
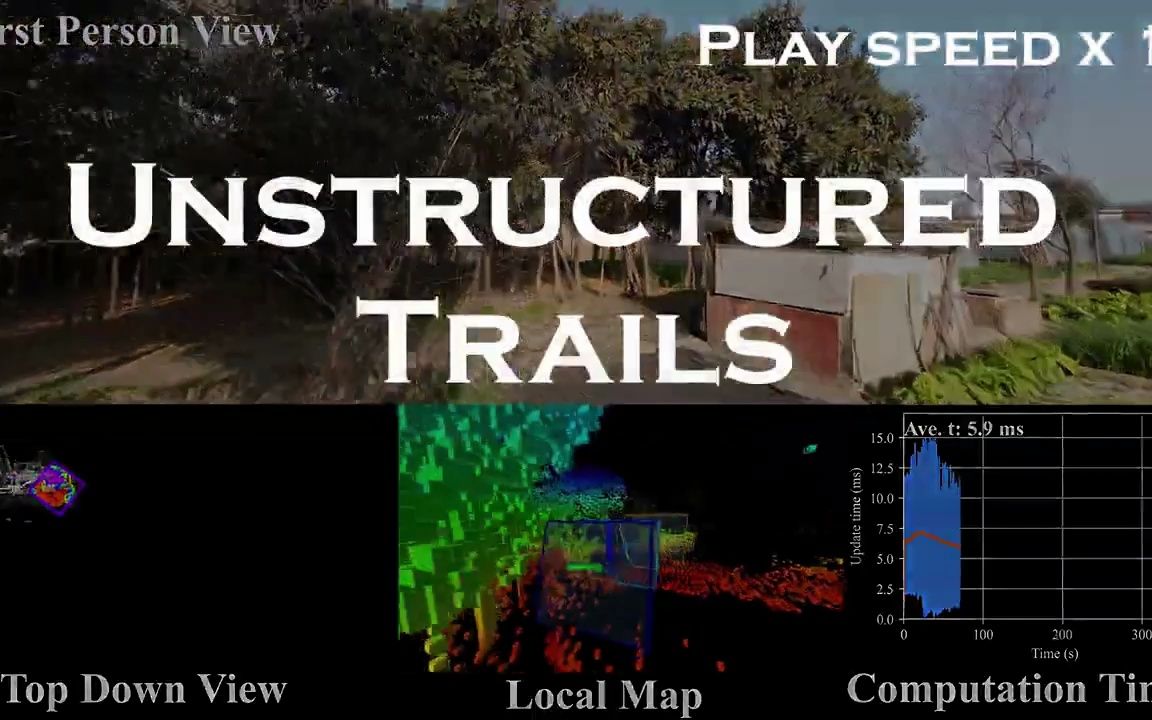
香港大学最新!ROG-map:高效的以机器人为中心的占用网格地图
发布人
激光雷达技术的最新进展为机器人导航开辟了新的可能性。 鉴于占用网格图(OGM)在机器人运动规划中的广泛使用, 本文旨在解决将激光雷达与OGM集成的挑战。为此,我们 提出了ROG Map,这是一种基于统一网格的OGM,它可以 维护与机器人一起移动的局部地图,以实现高效的地图操作 并降低大场景自主飞行的内存成本。 github: https://github.com/hku-mars/ROG-Map arxiv preprint: https://arxiv.org/abs/2302.14819
打开封面
下载高清视频
观看高清视频
视频下载器
ICRA2023 | 激光雷达相机内外参联合标定方案!
基于NVIDIA Isaac Sim和LIO-SAM的激光SLAM demo
【开源】百元价格就能实现学习ROS和SLAM导航的口袋式桌面机器人!
牛津大学IROS2023最新!激光雷达相机外参标定新算法(大幅降低误差)
达妙轮腿太空步!妙啊!
台湾抽象于北辰:要用粘鼠板打败我们的机械狗
20届智能车双车赛题浅浅完个赛吧!
👋Arc浏览器的告别与新起点丨终章丨完结丨新产品ing
NeurlPS'24开源 | 迈向SLAM/SfM回环新纪元!MSG:关联场景中共视的地点和目标!
500公里超大型SLAM数据集!多视觉异步SLAM系统(ICRA 2021)
弱光环境下的SLAM系统
同时优化姿态和占用图!Occupancy-SLAM:基于优化的SLAM方法
自动驾驶多传感器数据融合(2):IMU和GPS的融合定位
Nerf+SLAM会擦出什么样的火花?
上交&诺亚最新 | 大幅提升!OccGen:面向自动驾驶的生成式多模态3D占用预测
Figure 02最新动态:速度提高4倍,成功率提高7倍!
浙江省你做的好啊,第一次工训就给我上强度(•ิ_•ิ)?
点赞过300开源,2024四川省智能物流国赛选拔赛现场,四川第二
一个没啥特点的工程化激光slam(某二线城市的“大型”地铁站)
狗!太狗了!当‘狗’遇上‘臂当‘狗’遇上‘臂’,又会碰撞出什么样的火花! #松灵机器人 #机械臂 #宇树机器狗 #科研 又会碰撞出什么样的火花!
高精地图制作关键技术及领域主流方案分享-part1
【ICRA 2023】COVINS-G: 一种协同可视化惯性 SLAM 通用后端
2022最新!Nvidia完整阐释自动驾驶中的视觉感知(超赞技术)
【混沌meme】机器狗和PTSD
超全干货 | 自动驾驶中的传感器融合:前融合+后融合+特征级融合(方法与策略)
无限逼近人类身体构造,人工肌肉驱动的类人机器人Torso登场
实时3D激光SLAM | 基于广义ICP和位姿图优化的实时无里程计方案(超赞!)
牛津大学 | IMU+Lidar+GNSS的多传感器融合用于机器人的精准定位!
教练!我也要去纽北刷圈!
ICRA 2023 | 直接激光雷达惯性里程计:具有连续时间运动校正功能的轻量级LIO(UCLA最新)
多传感器融合!BEV感知融合算法介绍
视觉SLAM进阶-从零开始手写VIO
【开源】听懂人话的6轴Agent机械臂
超详细的激光雷达相机标定教程!(Lidar-Camera)
无人机SLAM入门教程(一):课程概述1.1 SLAM基础概念
【开源】如何手工打造一台理想中的机器人?
在线高精地图与城市NOA是什么关系?为什么如此重要?
ICRA2022 | 基于图的多传感器融合在自动施工机器人一致定位中的应用
UC伯克利最新!S3Gaussian:全球首个开源的自动驾驶场景3D GS工作
低成本,但很惊艳,带16线激光雷达的自动机器人SLAM演示