V
主页
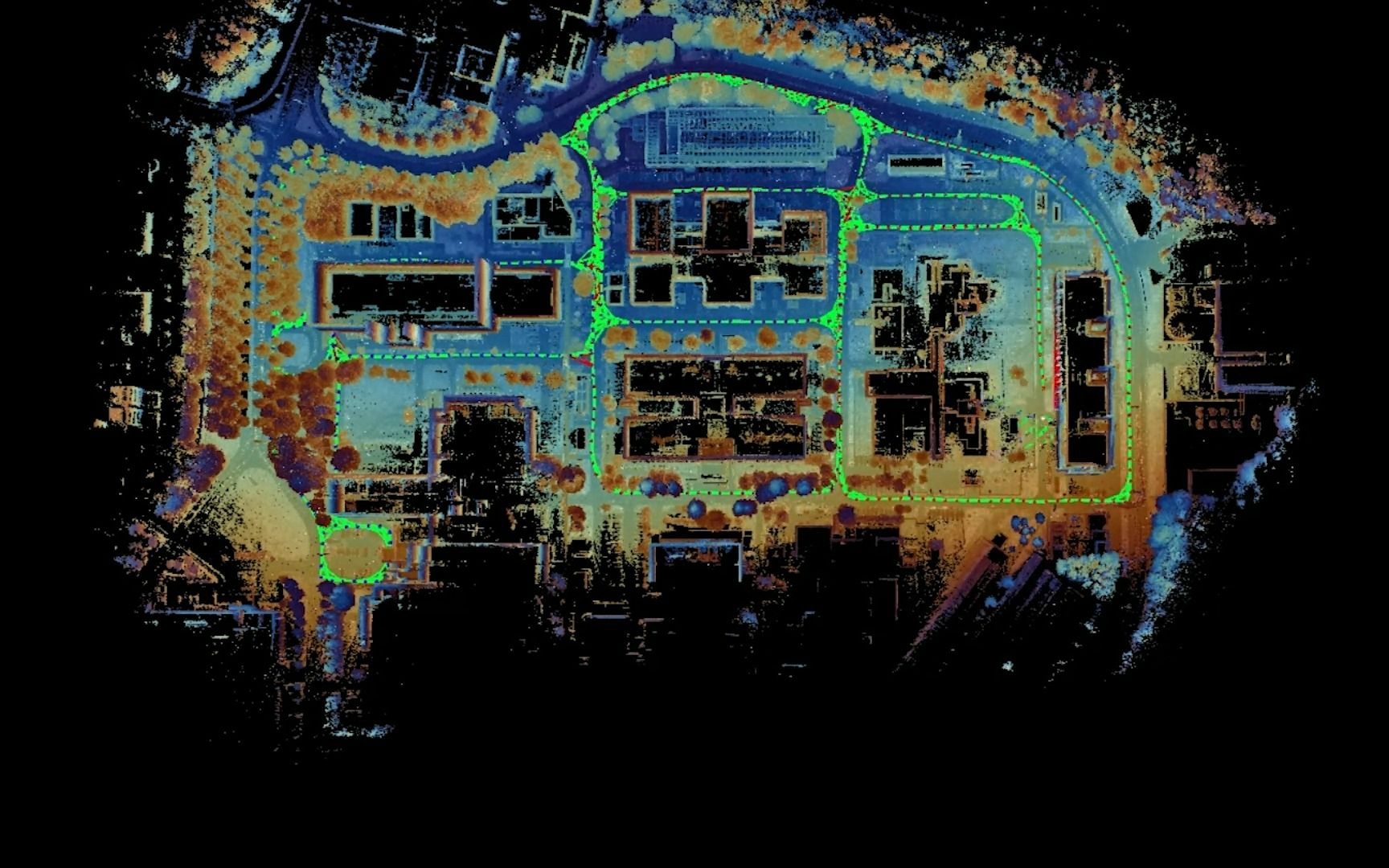
实时3D激光SLAM | 基于广义ICP和位姿图优化的实时无里程计方案(超赞!)
发布人
项目主页:https://unit.aist.go.jp/hcmrc/mr-rt/index.html
打开封面
下载高清视频
观看高清视频
视频下载器
通过Intel Realsense 3D激光雷达完成SLAM任务!(性价比超高)
LIO-SAM:一种紧耦合激光雷达-惯性里程计
KTH最新SOTA!大规模回环闭合 | 基于NeRF的稠密SLAM
ICRA2022 | 基于图的多传感器融合在自动施工机器人一致定位中的应用
牛津机器人研究所分享最新SLAM算法及其前沿设备
LVI-SAM和LIO-SAM、LeGO-LOAM效果对比
【成果展示】室外室内实景三维重建、SLAM与精确测量——复杂环境快速勘测与精确三维重建,适用于水电验收,房屋维护、测量取证、数字孪生、建筑保存、复杂地理环境评估
CVPR2022 | NICE-SLAM:神经隐式表示在大型室内场景上的密集重建
终生SLAM框架!BioSLAM:用于一般地点识别的仿生终身记忆系统
自动驾驶多传感器数据融合(3):单目标跟踪算法
LIO-Fusion:通过与GNSS/重新定位和车轮里程计的有效融合增强LIO
速度快!MobileNeRF:移动端实时渲染方案,Nerf导出Mesh
2022最新!Nvidia完整阐释自动驾驶中的视觉感知(超赞技术)
什么是端到端自动驾驶?什么是基础world model?
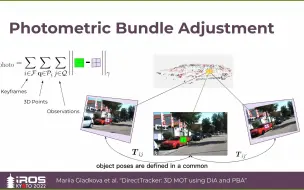
最新3D多目标跟踪方法DirectTracker:基于直接图像对齐和光度学束调整的3D多目标跟踪(IROS2022)
Tesla FSD V13前瞻!
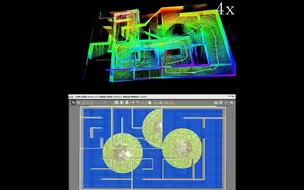
SLAMesh: 基于Mesh地图的实时LiDAR定位与Mesh建图方法分享
IROS2022 | 连续时间立体视觉惯性里程计
大纲一览 | 规划控制算法都在这里了!PNC今年的香饽饽!近10种规控算法与代码实现你都知道吗?
自动驾驶的规划控制究竟在做什么?我们为什么需要规划控制
最新多传感器融合数据集!Hilti SLAM Challenge Dataset(RAL-IROS 2022)
校招和社招转行人必看!2023年如何入局自动驾驶?
Lidar vs. Tesla:自动驾驶路线之争!激光雷达还是纯视觉?
端到端基础!绕不开的感知模块
激光雷达3D目标检测算法有哪些?怎么分类的?
自动驾驶中的多传感器融合状态估计如何建模?
香港大学最新!ROG-map:高效的以机器人为中心的占用网格地图
数据为王!自动驾驶开源数据体系现状与未来
决策规划都有哪些框架?PNC今年的香饽饽!近10种规控算法与代码实现你都知道吗?
为自动驾驶构建城市规模的神经辐射场
详解CPU的并行处理优化方向!基于TensorRT的CNN/Transformer/检测/BEV模型四大部署代码+CUDA加速!
CVPR 2023 | 通过点云预测作为4D Occupancy 预测的代理
讲明白了!端到端算法评估指标详解
逆天了!NeLF-Pro | 一个方法解决多种规模场景的快速渲染重建(CVPR'24)
IROS2022 | MIMOSA:针对传感器退化的多模态SLAM框架
地平线VAD又又又上新了!VADv2比v1强在哪里?一起来听
【NeurIPS 2023】自动驾驶多模态感知蒸馏新方案来了!
从未见过如此详细的CPU并行讲解!基于TensorRT的CNN/Transformer/检测/BEV模型四大部署代码+CUDA加速!
轨迹预测到底预测个啥???轨迹预测入门必备!
在线高精地图 | TopoMLP:驱动拓扑推理的简单而强大的pipeline