V
主页
牛津大学IROS2023最新!激光雷达相机外参标定新算法(大幅降低误差)
发布人
论文链接:https://www.dropbox.com/s/arhpp59d502fuks/2023IROS_fu.pdf?dl=0 多模态传感通常涉及确定每个域的信号之间的对应关系,这反过来又取决于传感器的精确外参标定。我们只使用一个简单的现成棋盘,就提出了一个相机和激光雷达的外部标定框架。它被设计为即使在激光雷达观察到棋盘的显著截断部分时也能工作。
打开封面
下载高清视频
观看高清视频
视频下载器
超详细的激光雷达相机标定教程!(Lidar-Camera)
搞懂了!原来激光雷达和相机的内外参是这样标定的
IROS2022 | 毫米波雷达和相机融合在高分辨率和远距离深度成像中的探索
相机标定
实时3D激光SLAM | 基于广义ICP和位姿图优化的实时无里程计方案(超赞!)
大幅超越SuperGlue!ICCV2023最新端到端特征匹配方法
看完缓解了我的技术焦虑!自动驾驶的产线标定以及标定间标定方法
终生SLAM框架!BioSLAM:用于一般地点识别的仿生终身记忆系统
实战超详细!Radar、Lidar和前置Camera的标定
车祸前0.1秒退出智驾?致敬0.1秒手速合集
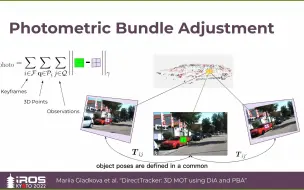
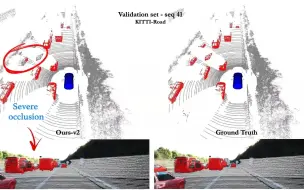
最新3D多目标跟踪方法DirectTracker:基于直接图像对齐和光度学束调整的3D多目标跟踪(IROS2022)
最新!如何使用深度强化学习在未知环境中进行导航?
使用概率深度补全的3D激光雷达重建(IROS2022)
上交&诺亚最新 | 大幅提升!OccGen:面向自动驾驶的生成式多模态3D占用预测
端到端算法是什么?自动驾驶领域是怎么做的?
【IROS2022】MPC-PF:使用势场的自动驾驶动态目标的社会交互感知轨迹预测
2022最新!Nvidia完整阐释自动驾驶中的视觉感知(超赞技术)
决策规划都有哪些框架?PNC今年的香饽饽!近10种规控算法与代码实现你都知道吗?
IROS2022 | MIMOSA:针对传感器退化的多模态SLAM框架
超全干货 | 自动驾驶中的传感器融合:前融合+后融合+特征级融合(方法与策略)
量产经验分享:如何提升相机标定的精度?
IROS2022最新思路 | RCA:自监督学习实现视觉导航(具有驾驶舒适性)
LeTS-Drive:自动驾驶中不确定场景下的实时路径规划算法
定位误差小于20cm!MT F-CVT:增强泊车区域感知
自动驾驶多传感器数据融合(2):IMU和GPS的融合定位
以特斯拉为案例:自动驾驶仿真框架分析(下,仿真应用/2D检测/3D检测/车道线)
同时优化姿态和占用图!Occupancy-SLAM:基于优化的SLAM方法
牛津大学 | IMU+Lidar+GNSS的多传感器融合用于机器人的精准定位!
详解!基于Camera和基于激光雷达的自动驾驶系统区别!
通过Intel Realsense 3D激光雷达完成SLAM任务!(性价比超高)
华为aeb失效?阿维塔11刚更新ads3.1就撞了!
麻省理工开源!LidarDM: 生成逼真、合理连贯的激光雷达点云数据
IROS2022最新 | 基于激光雷达的三维运动目标分割的高效时空信息融合
今天M9智驾自己进服务区,还真见证了一次“AI成精”。也不知道哪个神经元啥时候学会了啥
基于深度学习的自动驾驶控制模拟(复现钱彬csdn播客)
R3LIVE++:一个实时鲁棒的紧耦合激光雷达-惯性-视觉融合框架
IROS2022 | 连续时间立体视觉惯性里程计
相机标定任务概述 | 哥伦比亚大学相机模型与标定系列课程(1)
使用智能驾驶,短短的三分钟我差点撞两次。
LIO-SAM:一种紧耦合激光雷达-惯性里程计