V
主页
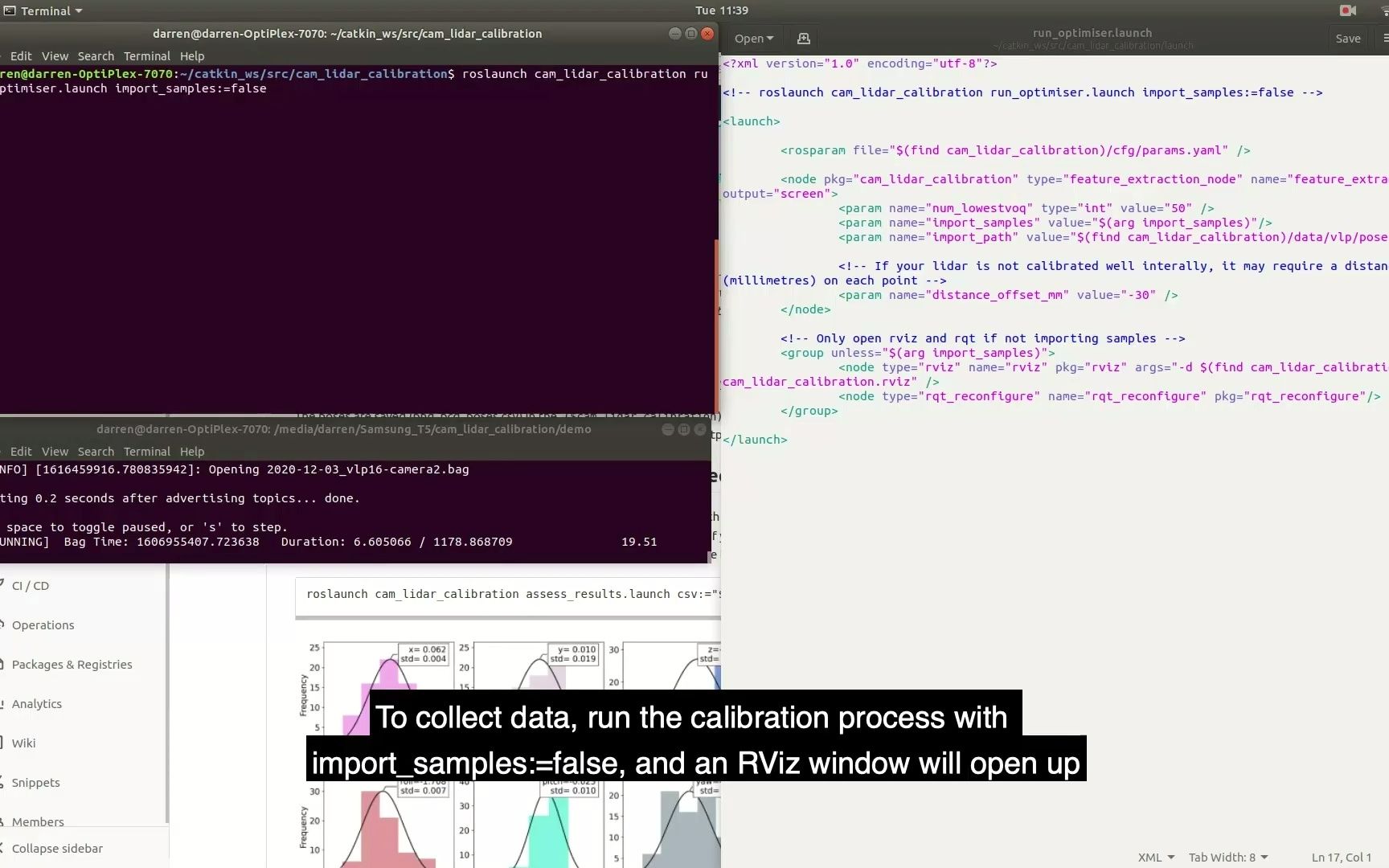
超详细的激光雷达相机标定教程!(Lidar-Camera)
发布人
论文链接:https://arxiv.org/abs/2103.12287 代码链接:https://github.com/acfr/cam_lidar_calibration 基于ROS框架,完成激光雷达相机的外参标定!
打开封面
下载高清视频
观看高清视频
视频下载器
ICRA2023 | 激光雷达相机内外参联合标定方案!
牛津大学IROS2023最新!激光雷达相机外参标定新算法(大幅降低误差)
多传感器标定概述(Lidar/Radar/Camera/IMU/鱼眼相机)
实战超详细!Radar、Lidar和前置Camera的标定
相机标定
毫米波雷达视觉到底是怎么融合的?CenterFusion你搞懂了吗?
IROS2022 | 毫米波雷达和相机融合在高分辨率和远距离深度成像中的探索
看完缓解了我的技术焦虑!自动驾驶的产线标定以及标定间标定方法
BEVFusion:一个简单而鲁棒的Lidar-Camera融合框架
毫米波雷达-视觉融合感知方法(前融合/特征级融合/数据级融合)
ICRA 2023 | 直接激光雷达惯性里程计:具有连续时间运动校正功能的轻量级LIO(UCLA最新)
大火的BEVFusion算法详解
使用YOLOv4完成激光雷达点云下的3D目标检测!
LIO-SAM:一种紧耦合激光雷达-惯性里程计
量产经验分享:如何提升相机标定的精度?
摄像头取代激光雷达,可能吗?
R3LIVE++:一个实时鲁棒的紧耦合激光雷达-惯性-视觉融合框架
【自动驾驶实践】多激光雷达实车安装&外参标定&拼接预处理
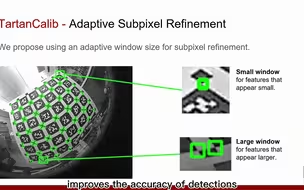
开源广角相机标定!TartanCalib:基于AprilTags自适应亚像素细化的迭代广角镜头标定(卡内基梅隆大学)
2022最新!基于激光雷达的3D目标检测综述(超全数据集和SOTA方法汇总)
牛津大学 | IMU+Lidar+GNSS的多传感器融合用于机器人的精准定位!
香港大学最新!ROG-Map:一种基于LiDAR的高效机器人中心占用网格地图
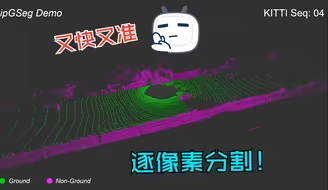
又快又准!一种基于图像表示的快速精确的LiDAR地面分割算法
激光雷达3D目标检测算法有哪些?怎么分类的?
特斯拉的4D自动标注详解!为什么无标注数据work?
多传感器融合!BEV感知融合算法介绍
太详细了!多传感器融合的策略和方法
浙江大学最新 | BEVPlace++:激光雷达全局定位方法,超越当前SOTA!泛化性能极佳
多传感器标定的工具箱有哪些?
83FPS,史上最快 | IA-SSD: 基于point方式的高效激光雷达点云3D目标检测网络(CVPR2022)
2022最新!Nvidia完整阐释自动驾驶中的视觉感知(超赞技术)
自动驾驶多传感器数据融合(4):多目标跟踪算法
通过Intel Realsense 3D激光雷达完成SLAM任务!(性价比超高)
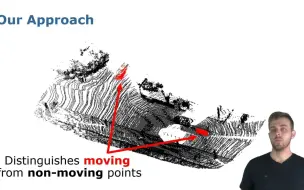
SemanticKITTI SOTA!激光雷达数据中的运动目标分割(IROS2022)
关于自动驾驶的一切(层级划分/Lidar/Radar/视觉感知/AI与发展等)
自动驾驶多传感器数据融合(1):什么是多传感器融合?
SLAMesh: 基于Mesh地图的实时LiDAR定位与Mesh建图方法分享
小鹏P7+纯视觉能比得过激光雷达吗?一个视频看懂!
最新!如何使用深度强化学习在未知环境中进行导航?
视觉3D检测如何做自动标注?