V
主页
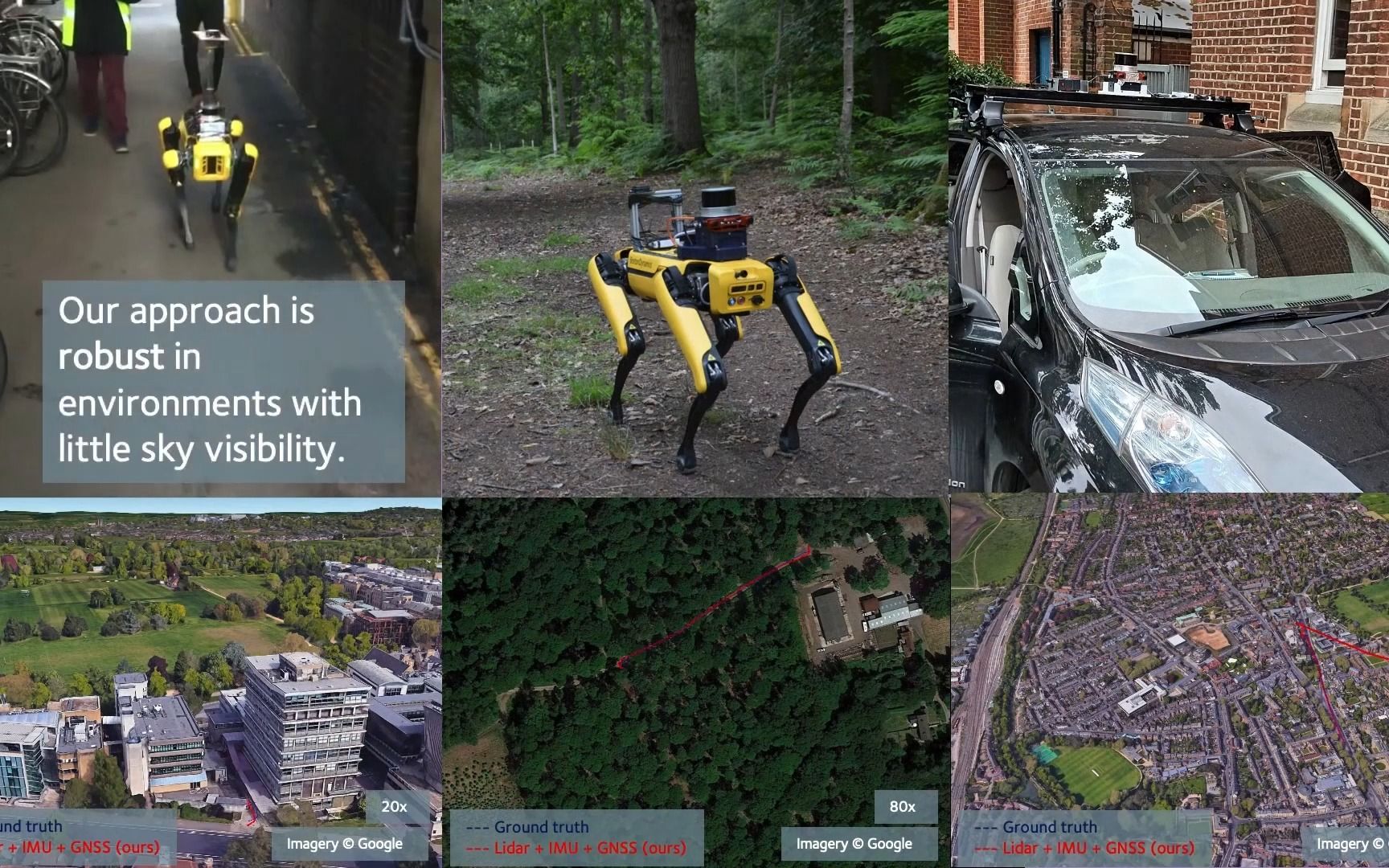
牛津大学 | IMU+Lidar+GNSS的多传感器融合用于机器人的精准定位!
发布人
论文链接:https://arxiv.org/abs/2209.14649 视频链接:https://www.youtube.com/watch?v=55BLjt6ce1Y&ab_channel=OxfordDynamicRobotSystemsGroup 准确定位是机器人导航系统的核心组成部分。为此,全球导航卫星系统 (GNSS) 可以在户外提供绝对测量,从而消除长期漂移。然而,将 GNSS 数据与其他传感器数据融合并非易事,尤其是当机器人在有和没有天空视野的区域之间移动时。我们提出了一种稳健的方法,该方法将原始 GNSS 接收器数据与惯性测量以及可选的激光雷达观测紧密融合,以实现精确和平稳的移动机器人定位。提出了具有两类GNSS因子的因子图。首先,基于伪距的因素,允许在地球上进行全球定位。其次,基于载波相位的因素可以实现高度准确的相对定位,这在其他传感方式受到挑战时很有用。与传统的差分 GNSS 不同,这种方法不需要连接到基站。在公共城市驾驶数据集上,我们的方法实现了与将视觉惯性里程计与 GNSS 数据融合的最先进算法相当的精度——尽管我们的方法不使用相机,而只使用惯性和 GNSS 数据。我们还使用来自汽车和四足机器人在天空能见度低的环境(例如森林)中移动的数据证明了我们方法的稳健性。全球地球框架中的精度仍然是 1-2 m,而估计的轨迹是无间断和平滑的。我们还展示了如何紧密集成激光雷达测量。我们相信这是第一个将原始 GNSS 观测(而不是修复)与激光雷达融合的系统。
打开封面
下载高清视频
观看高清视频
视频下载器
自动驾驶多传感器数据融合(2):IMU和GPS的融合定位
香港大学最新!ROG-Map:一种基于LiDAR的高效机器人中心占用网格地图
计算效率提升20% | 直接LiDAR-惯性里程计:具有连续时间运动校正的轻量级LiDAR-惯性里程计
牛津大学IROS2023最新!激光雷达相机外参标定新算法(大幅降低误差)
太详细了!多传感器融合的策略和方法
自动驾驶中的多传感器融合状态估计如何建模?
IROS2022 | 毫米波雷达和相机融合在高分辨率和远距离深度成像中的探索
SOTA!ECCV2022 | 实现精确的主动相机定位(Camera Localization)
iKalibr: 统一的多传感器无靶标时空标定
精准排三推荐定位已出,恭喜昨天收菜的老板,继续红起来,稳定数据可查,专业分析数据
又快又准!一种基于图像表示的快速精确的LiDAR地面分割算法
毫米波雷达-视觉融合感知方法(前融合/特征级融合/数据级融合)
LIO-SAM:一种紧耦合激光雷达-惯性里程计
毫米波雷达视觉到底是怎么融合的?CenterFusion你搞懂了吗?
IROS2022 | MIMOSA:针对传感器退化的多模态SLAM框架
多传感器标定的工具箱有哪些?
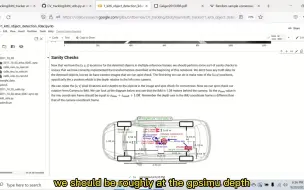
传感器融合教程 Part 5 - Check the Math
大火的BEVFusion算法详解
MentorPi 开源机器人小车:搭载树莓派5,兼容ROS2;
香港理工大学最新!Slamesh: 使用激光雷达传感器进行实时定位和网格划分
麻省理工团队 | Fast-LiDARNet:基于激光雷达的高效鲁棒端到端导航框架
Xsense离职大佬意外泄漏了公司IMU核心算法代码,这个瓜有点大,快来看看代码吧
SLAMesh: 基于Mesh地图的实时LiDAR定位与Mesh建图方法分享
喜报•我方电赛&robocup&江苏省机器人大赛无人机定位精度已达1cm!!!(多日不见,水个视频)
自动驾驶多传感器数据融合(3):单目标跟踪算法
点云地图中的重定位
【深信科创联合制作】仿真数据的一百种玩法 | 基于Carla传感器的仿真数据增强实战来了!
2022最新!Nvidia完整阐释自动驾驶中的视觉感知(超赞技术)
干货来了!ADAS传感器产品及市场分析
高精地图制作关键技术及领域主流方案分享-part1
搞懂了!原来激光雷达和相机的内外参是这样标定的
【空间计算】VIOBOT2 室内 定位 导航【里程计】【实测】
GPS+IMU+3D激光建图
这个世界上有一种人,我认为最值得尊重
【IROS2022】Voxfield:用于在线规划和三维重建的非投影符号距离场
World Model!大火的世界模型到底是什么?
多模态3D检测相关2D和3D感知基础知识
香港科技最新!Contour Context:3D激光雷达回环检测和度量姿态估计的抽象结构分布(ICLR2023)
Nerf+SLAM会擦出什么样的火花?
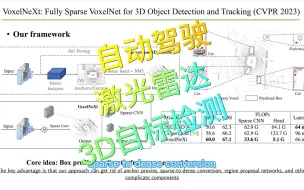
CVPR 2023:VoxelNeXt:用于3D目标检测和跟踪的全稀疏新框架!