V
主页
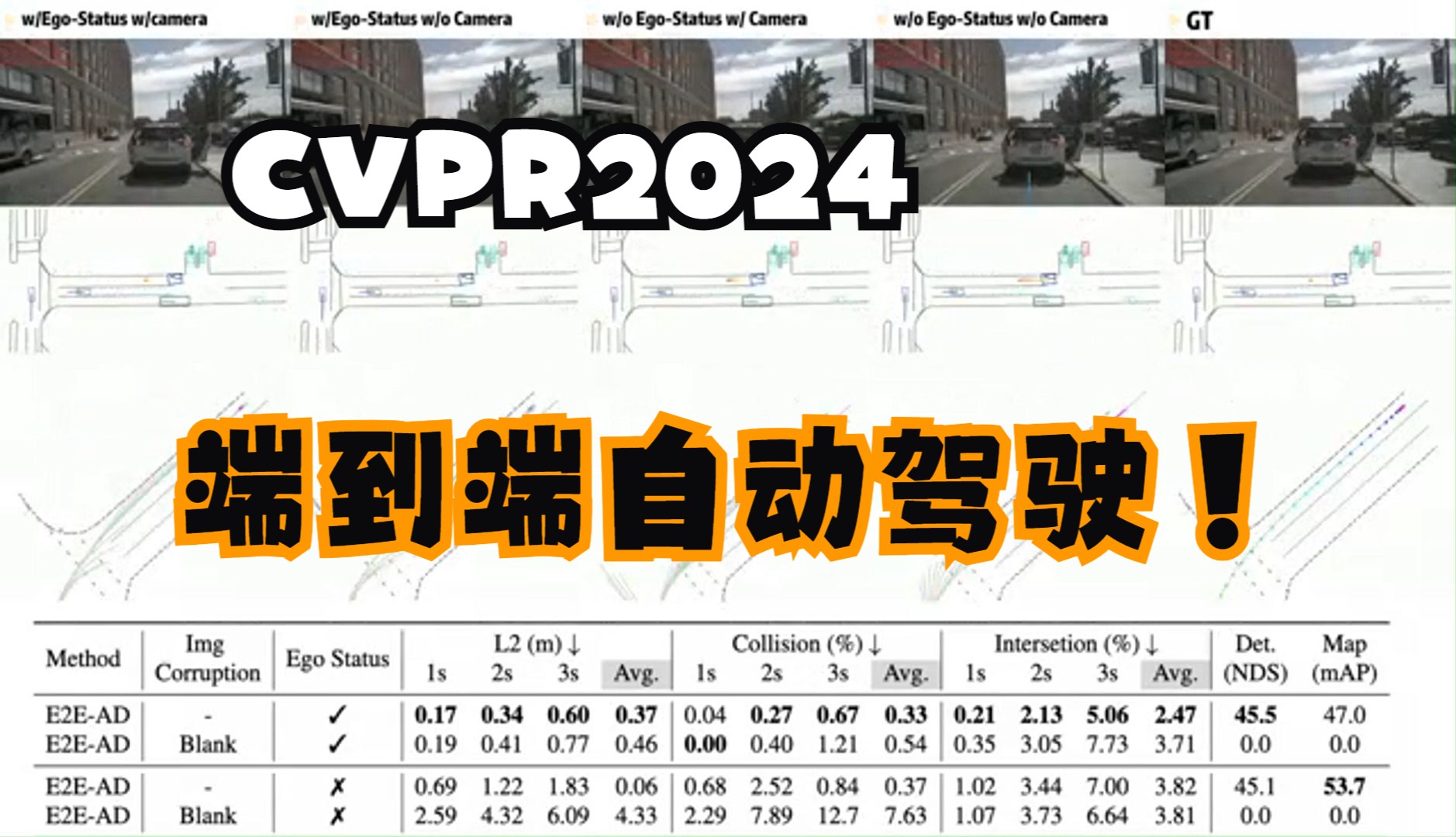
CVPR2024最新BEV-Planner:Ego Status对于开环端到端自动驾驶的影响有哪些?
发布人
CVPR2024最新BEV-Planner:Ego Status对于开环端到端自动驾驶的影响有哪些?论文链接:https://arxiv.org/pdf/2312.03031.pdf
打开封面
下载高清视频
观看高清视频
视频下载器
清华大学&英伟达 | DriveEnv-NeRF:基于NeRF实现高逼真自动驾驶场景,离线测试!
端到端模型上车了!GraphAD:国内首个可实车量产部署的端到端建模范式
世界模型!特斯拉CVPR2023 Workshop!
CVPR2024最新Occ工作!Selfocc:无需3D监督完成占用任务
端到端自动驾驶:SparseDrive 算法详解
面试必备!自动驾驶中BEV常考知识点大串讲
专注于学习PnC的端到端方法详解
大幅超越SuperGlue!ICCV2023最新端到端特征匹配方法
爆肝整理!CVPR2024可复现论文合集,原文/代码/演示全都有!(深度学习/计算机视觉)
英伟达冠军方案!Hydra-MDP:多模态端到端自动驾驶详解
牛津大学CVPR2024 oral | MicKey:特征点检测方法,无需深度测量推断pose!
经验之谈,轨迹预测真正重要的是什么?
ETH最新!CVPR2024 | GoMVS:多视图几何重建新SOTA
端到端算法有哪些优势?完爆传统感知规控?
港科大最新!Vista:高保真度、通用可控性的自动驾驶世界模型
自动驾驶规划控制的未来是什么?
【CVPR 2024】SIN-SLAM:基于神经隐式表征的稠密语义SLAM
大火的BEVFusion算法详解
理想端到端+VLM6.5beta6.5.1V5.8.6通勤视频
端到端智驾是什么?有什么优点?信息量大,没耐心就不要点啦~
新时代降临!多模态大模型的训练范式都有啥?
史上最全!一次性梳理自动驾驶鲁棒性研究
自动驾驶中的多传感器融合状态估计如何建模?
多障碍物联合预测!理论全搞定~
轨迹预测到底预测个啥???轨迹预测入门必备!
【地平线×自动驾驶之心】在线高精矢量化地图构建SOTA方案MapTR v1/v2、LaneGAP
从0到1!彻底搞懂BEVFormer算法原理
自动驾驶规控工程师必备技能点!Coupling Trajectory Planning是个啥?
没有BEV特征如何做BEV感知?(旷视团队分享PETRv2/StreamPETR/CMT等SOTA方案)
浙江大学最新 | BEVPlace++:激光雷达全局定位方法,超越当前SOTA!泛化性能极佳
今年的智驾只有一个声音:端到端+大模型
Nuscenes、KITTI等多个BEV开源数据集介绍!
CVPR2023最新!TBP Former:BEV下以视觉为中心的自动驾驶中的联合感知和预测网络
性能提升近40%!ViPlanner:室内外局部导航全搞定(ICRA 2024)
看完缓解了我的技术焦虑!自动驾驶的产线标定以及标定间标定方法
多传感器标定的工具箱有哪些?
『汽车人有话说』试驾都要排队的小米,自动驾驶到底行不行
比赛冠军方案!英伟达最新 | Hydra MDP:端到端多模态规划
定位误差小于20cm!MT F-CVT:增强泊车区域感知
XNGP真实智驾周记 | 迄今最强版本5.4.0