V
主页
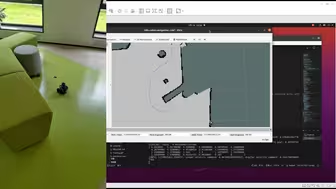
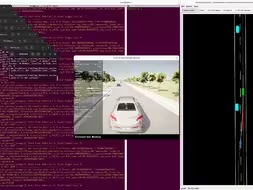
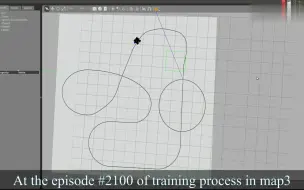
最新!如何使用深度强化学习在未知环境中进行导航?
发布人
在本视频中,将解释如何使用深度强化学习在未知环境中进行导航; 项目链接:https://drive.google.com/drive/folders/1JJHC59IyypIF9JXdzzF1K_zQiq_fo0Dv
打开封面
下载高清视频
观看高清视频
视频下载器
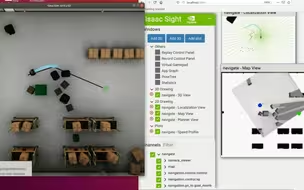
强化学习导航:仿真环境训练及ROS实车部署
基于ROS2的自动驾驶决策规划系统--深度强化学习决策--Lattice规划--MPC控制
移动无人车自动路径规划之深度强化学习(Deep Reinforcement Learning)
【路径规划】基于DQN深度强化学习算法的路径规划
基于多模态感知与深度强化学习的无人车自主导航
基于深度强化学习(Deep Reinforcement Learning)的移动无人车自动路径规划MATLAB
基于强化学习和速度障碍法的多机器人导航
快被强化学习劝退了
【深度强化学习在自动驾驶领域代码实践】p2:Q-learning理论和代码实践
【强化学习-DQN】Q-learning与DQN实战!三连关注送源码+强化学习pdf(比畅销书好理解多了,我自己用它学的强化学习)!
深度强化学习无人机自主导航
深度强化学习训练机械臂实时避障,VREP仿真
基于深度强化学习自适应SAC-PID控制方法循线机器人
MPC + 强化学习![ICRA 24] Actor Critic Model Predictive Control
深度强化学习自动避障
transformer结合强化学习创新:组成端到端导航策略Agent,无需微调直接迁移!
3D目标检测+卡尔曼滤波+强化学习自主导航在airsim环境下实现无人机目标跟踪
【论文代码复现122】基于强化学习的路径规划问题||强化学习和群智能优化算法有什么区别
强化学习无人机轨迹规划
【深度强化学习在自动驾驶领域代码实践】p1:绪论和gym环境实操
基于深度强化学习的机器人自主导航
强化学习+模仿学习实现简单的机器人导航
基于深度强化学习算法DQN的移动机器人路径规划仿真平台
Airsim无人机强化学习实现自主导航功能
强化学习(PPO)训练小车到达目标
强化学习(PPO)训练小车避障到达目标
基于深度强化学习小车运动规划实现静态障碍物的绕行:单个障碍物模型推广到多个障碍物
【Isaac Gym】四足&双足-强化学习训练效果
[强化学习]自动驾驶路径规划与控制-DQN/DDPG+pure pursuit路径跟踪实现
深度强化学习训练平衡步兵机器人开源
基于多智能体(无人机群)路径探索的深度强化学习
通过深度强化学习让AI学会走路,学步过程堪比真人!
快速且鲁棒的深度强化学习导航策略的训练与部署
基于模仿强化学习的移动机器人高效自主导航
基于深度强化学习的slam(同时还跑了一个暂时没用的语义分割)
基于强化学习的狭窄空间自探索
【论文代码复现83】强化学习求解机器人路径规划的很好用的ui设计||pyqt实现界面设计
四足机器人鲁棒&高速移动的强化学习控制器
深度强化学习,无人车动态避障
多智能体强化学习路径搜索——新加坡