V
主页
浙江大学最新 | BEVPlace++:激光雷达全局定位方法,超越当前SOTA!泛化性能极佳
发布人
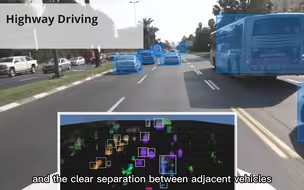
原文链接:https://arxiv.org/abs/2408.01841,项目链接:https://github.com/zjuluolun/BEVPlace BEVPlace++是一种基于激光雷达(LiDAR)的全局定位方法。它将点云投影到鸟瞰图(BEV)图像中,并使用旋转等变模块和NetVLAD生成全局特征。它依次执行地点识别和位姿估计,以实现完整的全局定位。实验表明,BEVPlace++的性能明显优于最先进的(SOTA)方法,并且能很好地推广应用于以前未见过的环境。BEVPlace++必将惠及包括闭环检测、全局定位和SLAM在内的各种应用。请随意使用并享受它!
打开封面
下载高清视频
观看高清视频
视频下载器
牛津大学最新!室内室外SOTA | 用于视觉重定位的地图相对姿态回归(CVPR'24 HighLight)
香港理工大学最新!Slamesh: 使用激光雷达传感器进行实时定位和网格划分
上海AI Lab最新!Depth any Video:提升深度估计的一致性以及合成更多真实带有标注的数据
使用YOLOv4完成激光雷达点云下的3D目标检测!
ICRA 2023 | 直接激光雷达惯性里程计:具有连续时间运动校正功能的轻量级LIO(UCLA最新)
自动驾驶多传感器数据融合(2):IMU和GPS的融合定位
端到端算法有哪些优势?完爆传统感知规控?
大幅超越SuperGlue!ICCV2023最新端到端特征匹配方法
IROS2022 | 毫米波雷达和相机融合在高分辨率和远距离深度成像中的探索
透彻!特斯拉occupancy network详解
麻省理工开源!LidarDM: 生成逼真、合理连贯的激光雷达点云数据
聊一聊4D成像雷达在辅助驾驶领域的应用
一文尽览:自动驾驶大语言模型应用综述分享
LeTS-Drive:自动驾驶中不确定场景下的实时路径规划算法
香港理工最新 !SLAMesh:激光雷达传感器的SLAM系统,实时构建和利用网格
地平线VAD又又又上新了!VADv2比v1强在哪里?一起来听
史上最全!一次性梳理自动驾驶鲁棒性研究
IROS2022最新 | 基于激光雷达的三维运动目标分割的高效时空信息融合
【地平线×自动驾驶之心】ICCV 2023最新中稿的端到端自动驾驶框架—VAD!
毫米波雷达视觉算法CRAFT,这次彻底理解了!
端到端算法是什么?自动驾驶领域是怎么做的?
BEVFusion:一个简单而鲁棒的Lidar-Camera融合框架
没有BEV特征如何做BEV感知?(旷视团队分享PETRv2/StreamPETR/CMT等SOTA方案)
CVPR2022 | SHIFT:当前自动驾驶最大的多任务合成数据集(雾天/雨天/雪天,检测、分割、深度图、实例分割、光流)
在线高精地图与城市NOA是什么关系?为什么如此重要?
专注于学习PnC的端到端方法详解
端到端趋势下,传统规控还有未来么?
清华大学最新!GaussianFormer:Gaussians进军视觉Occupancy任务!
最新!如何使用深度强化学习在未知环境中进行导航?
TPVFormer:特斯拉occupany network的学术替代方案!清华大学工作
ICLR'24无图新思路!LaneSegNet:基于车道分段感知的地图学习(实时推理+三项SOTA)
激光雷达3D目标检测算法有哪些?怎么分类的?
SLAMesh: 基于Mesh地图的实时LiDAR定位与Mesh建图方法分享
CVPR2024最新BEV-Planner:Ego Status对于开环端到端自动驾驶的影响有哪些?
上交&诺亚最新 | 大幅提升!OccGen:面向自动驾驶的生成式多模态3D占用预测
LIO-Fusion:通过与GNSS/重新定位和车轮里程计的有效融合增强LIO
低成本,但很惊艳,带16线激光雷达的自动机器人SLAM演示
ETH最新!CVPR2024 | GoMVS:多视图几何重建新SOTA
自动驾驶缺少数据怎么办?ChatSim助你生成高度真实的驾驶数据!
同时优化姿态和占用图!Occupancy-SLAM:基于优化的SLAM方法