V
主页
【CoRL2022】路径规划新SOTA!PlanT:通过目标级表示的可解释的规划Transformers
发布人
关注公众号【自动驾驶之心】,后台回复“PlanT”获取论文代码等更多资料。 在复杂环境中规划最佳路线需要对周围场景进行有效推理。当人类驾驶员优先考虑重要的物体,忽略与决策无关的细节时,基于学习的规划者通常会从包含所有车辆和道路背景信息的场景的密集、高维网格表示中提取特征。在本文中,我们提出了PlanT,这是一种在使用标准Transformers架构的自动驾驶环境中进行规划的新方法。PlanT基于具有紧凑目标级输入表示的模拟学习。通过这种表示,我们证明了关于自车路线的信息为规划道路布局提供了充分的背景。在具有挑战性的CARLA Longest6基准中,PlanT优于所有先前的方法(与专家的驾驶分数匹配),同时在推理过程中比基于像素的等效规划基准快5.3倍。此外,我们提出了一种评估方案,以量化规划者识别相关对象的能力,从而提供有关其决策的见解。我们的结果表明,PlanT可以可靠地聚焦场景中最相关的目标,即使该目标在几何上很遥远。
打开封面
下载高清视频
观看高清视频
视频下载器
终生SLAM框架!BioSLAM:用于一般地点识别的仿生终身记忆系统
【IROS 2022】旅行时间减少47%!FAR Planner:使用动态可见性更新的快速、可尝试的路径规划
决策规划都有哪些框架?PNC今年的香饽饽!近10种规控算法与代码实现你都知道吗?
大幅超越SuperGlue!ICCV2023最新端到端特征匹配方法
TPVFormer:特斯拉occupany network的学术替代方案!清华大学工作
实时3D激光SLAM | 基于广义ICP和位姿图优化的实时无里程计方案(超赞!)
香港大学最新!ROG-Map:一种基于LiDAR的高效机器人中心占用网格地图
同时优化姿态和占用图!Occupancy-SLAM:基于优化的SLAM方法
透彻!特斯拉occupancy network详解
使用YOLOv4完成激光雷达点云下的3D目标检测!
通过Intel Realsense 3D激光雷达完成SLAM任务!(性价比超高)
CVPR2022 | MeMOT:具有记忆的多目标跟踪
【ICRA 2023】COVINS-G: 一种协同可视化惯性 SLAM 通用后端
天才中单体验德国女大学生开学的一天
端到端算法有哪些优势?完爆传统感知规控?
港科技最新SLAM数据集!SLABIM:香港科技大学主楼SLAM-BIM耦合数据集
为什么说规划控制仍然是端到端自动驾驶的核心?全面复盘规划控制基础及决策规划框架
基于交互感知的自动驾驶车辆轨迹规划——神经网络与模型预估计控制的集成
22年十佳开源SLAM算法
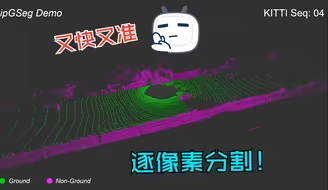
又快又准!一种基于图像表示的快速精确的LiDAR地面分割算法
【地平线×自动驾驶之心】在线高精矢量化地图构建SOTA方案MapTR v1/v2、LaneGAP
香港大学最新!ROG-map:高效的以机器人为中心的占用网格地图
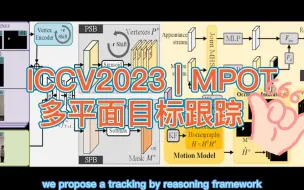
ICCV2023 | MPOT:多平面目标跟踪
大纲一览 | 规划控制算法都在这里了!PNC今年的香饽饽!近10种规控算法与代码实现你都知道吗?
高精地图制作关键技术及领域主流方案分享-part1
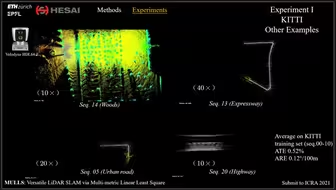
500公里超大型SLAM数据集!多视觉异步SLAM系统(ICRA 2021)
牛的!大佬是如何几分钟聊透时空联合规划框架的?
IROS'24开源 | 全新动态V3D-SLAM:3D语义几何投票的动态鲁棒RGB-D SLAM
计算效率提升20% | 直接LiDAR-惯性里程计:具有连续时间运动校正的轻量级LiDAR-惯性里程计
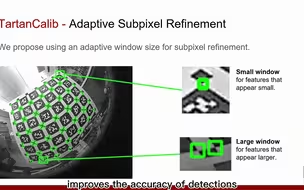
开源广角相机标定!TartanCalib:基于AprilTags自适应亚像素细化的迭代广角镜头标定(卡内基梅隆大学)
【IROS 2022】机器人超硬核点云配准方法:Linewise Non-Rigid Point Cloud Registration
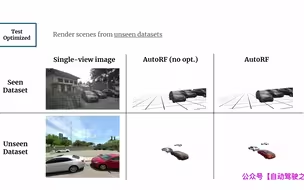
CVPR2022 | AutoRF:从单视角观察中学习3D目标辐射场(nuScenes和KITTI上表现良好)
数据为王!自动驾驶开源数据体系现状与未来
IROS2022 | 毫米波雷达和相机融合在高分辨率和远距离深度成像中的探索
【ECCV2022】首篇完全可微NeRF!Neural-Sim:学习使用NeRF生成训练数据(微软)
车道线方案第一名!OpenLane Topology自动驾驶挑战赛(CVPRW2023)
冠军!英伟达荣获CVPR端到端自动驾驶挑战赛第一名
IROS2022 | 我们准备好进行鲁棒且有弹性的SLAM了吗?
泰裤辣!谷歌最新,一次跟踪所有目标!Everything and everywhere
毫米波雷达-视觉融合感知方法(前融合/特征级融合/数据级融合)