V
主页
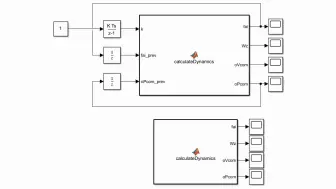
simulink四足机器人mpc操作记录:地形估计+足端轨迹规划+落足点规划
发布人
不能怪鸽得太久,只能怪mpc太难了。。。。
打开封面
下载高清视频
观看高清视频
视频下载器
总算是在过年前完成了四足机器人MPC!
四足运动:用三种不同的方法在崎岖地形上行走
四足机器人gazebo/simulink联合仿真
simulink四足机器人mpc+wbc操作记录:使用两种不同的方式进行质心规划
使用离散卡尔曼滤波对四足机器人进行状态估计
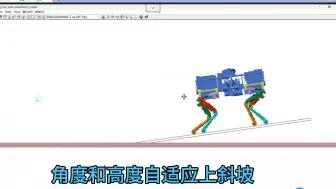
四足机器人MPC爬坡
【机甲出品】12自由度寻 迹四足 机 器 人
四足机器人VMC+状态估计完成!开始下一征程!!!
生产力大PK!!!——同时跑四足机器人vmc代码
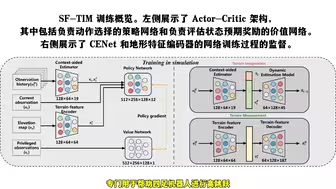
成功部署,敏捷度直接翻倍!浙大提出辅助四足机器人的跳跃新框架SF-TIM,敏捷度直接翻倍
simulink四足机器人仿真——人类早期驯服机器狗录像
PACC:使用 MPC 的四足机器人高负载协作搬运被动臂方法
动态场景路径规划算法-DWA(Dynamic Window Approach)
mixly随讲二百三十六ESP32四足机器人
Consensus Complementarity Control for Multi-Contact MPC
2024数学建模国赛A题-思路+程序,别错过干货!
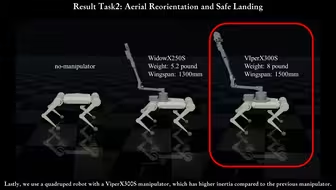
机械臂代替尾巴增强机器人的稳定性 四足机器人
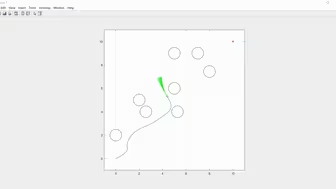
A*路径规划算法
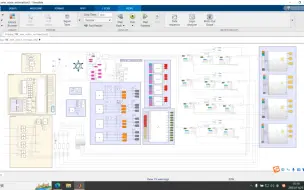
simulink电力系统仿真介绍
波士顿动力 MPC 控制策略的演进与思考
KAIST猎犬,四足机器人100米世界纪录
从零开始搭建Buck-Boost升降压电路的Simulink仿真(含开环,闭环,双闭环控制,PI参数调节方法)
Stateflow教程 15 真值表01
强化学习训练傻狗自杀式奔跑
Stateflow教程 13 在Chart中定义和使用各类函数01
【OCS2】进阶Demo也都迁移到ROS2啦
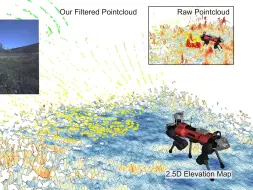
非结构化环境中腿式机器人的地形相关功率估计
草丛中的环境感知 四足机器人如何感知草丛中的地面情况
Stateflow教程 14 在Chart中定义和使用各类函数02
车辆避障MPC仿真(Model Predictive Controller)
腿式机器人的多接触惯性估计与定位 [论文在审稿中]
云深处科技携手昆泰芯微电子打造高性能四足机器人
[IROS 2024] 通过分布式优化加速腿式机器人的模型预测控制
你见过四轴机器狗吗 | 还挺Q萌 #机器狗DIY
从零开始搭建三相逆变并网的simulink仿真(DC/AC变换器直接电流控制)
A*路径规划方法
Stateflow教程 12 事件 Event 的使用03
虚拟同步发电机VSG(二)预同步并网离网切换并离网切换MATLAB/Simulink仿真
Stateflow教程 10 事件 Event 的使用01
动态变化环境中单足跳跃者的模型预测跑酷控制 代码地址在简介