V
主页
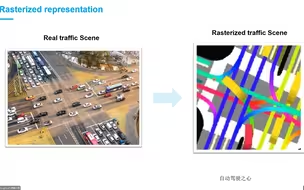
仿真到天际!Carla的世界建立与观察者生成
发布人
视频出自自动驾驶之心平台《Carla-Autoware联合仿真实战》:https://wrzpl.xetslk.com/s/1mVJYs
打开封面
下载高清视频
观看高清视频
视频下载器
逆天了!基于分层3D高斯表示的超大数据集实时渲染(SIGGRAPH 2024)
自动驾驶绕不开的仿真!LightSim:从零开始搭建一个真实、可控、可扩展的自动驾驶仿真平台
灵境OASim:仿真照进现实,生成更近一步
自动驾驶缺少数据怎么办?ChatSim助你生成高度真实的驾驶数据!
清华&地平线最新开源!全任务SOTA!SparseDrive:端到端自动驾驶新范式!
超详细!BEV感知算法的应用介绍
ITSC2023 | LimSim:长期可交互多场景交通仿真器
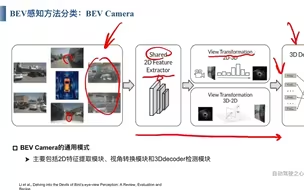
纯视觉/多传感器融合方案!BEV感知方法分类
重磅开源!MARS:基于隐式场的场景感自动驾驶仿真
轨迹预测真正重要的什么?又或者说实际落地的难点在哪里?
SurroundOcc:用于自动驾驶的多相机3D Occupancy预测
Segment Anything之后,分割的路在何方?
World Model!大火的世界模型到底是什么?
BEV-SAN:通过切片注意力网络实现精确的BEV 3D检测
Nuscenes、KITTI等多个BEV开源数据集介绍!
数据为王!自动驾驶开源数据体系现状与未来
自动驾驶假数据效果逆天了!Panacea:如何生成全景可控BEV感知数据?
YOLOv7 + Strong Sort在高速场景视频上表现超赞
『汽车人有话说』试驾都要排队的小米,自动驾驶到底行不行
OPPO和港中文大学推出GlyphDraw2,多文字海报生成如此简单!使用扩散模型和LLM自动生成复杂字形海报的端到端方案
视觉3D检测如何做自动标注?
牛津大学最新!室内室外SOTA | 用于视觉重定位的地图相对姿态回归(CVPR'24 HighLight)
车道线方案第一名!OpenLane Topology自动驾驶挑战赛(CVPRW2023)
CVPR2024最新BEV-Planner:Ego Status对于开环端到端自动驾驶的影响有哪些?
牛的!大佬是如何几分钟聊透时空联合规划框架的?
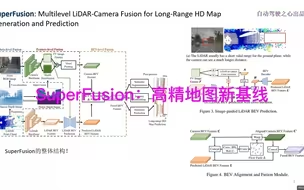
SuperFusion:高精地图新基线
跟知乎大V一起来学BEV!视觉BEV感知和跟踪算法详解
搞懂了!原来激光雷达和相机的内外参是这样标定的
牛津大学IROS2023最新!激光雷达相机外参标定新算法(大幅降低误差)
端到端模型上车了!GraphAD:国内首个可实车量产部署的端到端建模范式
大火的BEVFusion算法详解
数据为王!车道线数据高效生成策略有哪些?
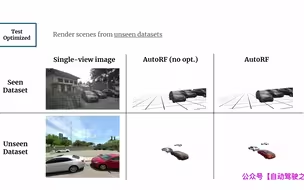
CVPR2022 | AutoRF:从单视角观察中学习3D目标辐射场(nuScenes和KITTI上表现良好)
自动驾驶安全的关键!| 轨迹预测中的经典模型大盘点
国内智驾老兵百度开源BEVWorld:通过统一BEV潜在空间实现自动驾驶的多模态世界模型
毫米波雷达-视觉融合感知方法(前融合/特征级融合/数据级融合)
ICLR 2023 |VA-DepthNet:单目图像深度预测的变分方法
Corner Case不可怕!自动驾驶Corner Case可控生成系统性解决方案来优化!
Depth Anything V2 | 速度提升10倍以上!更稳健、精细的单目深度估计(HKU&TikTok)
内卷时代如何降低自动驾驶数据的标注成本?双域主动学习可能是答案!