V
主页
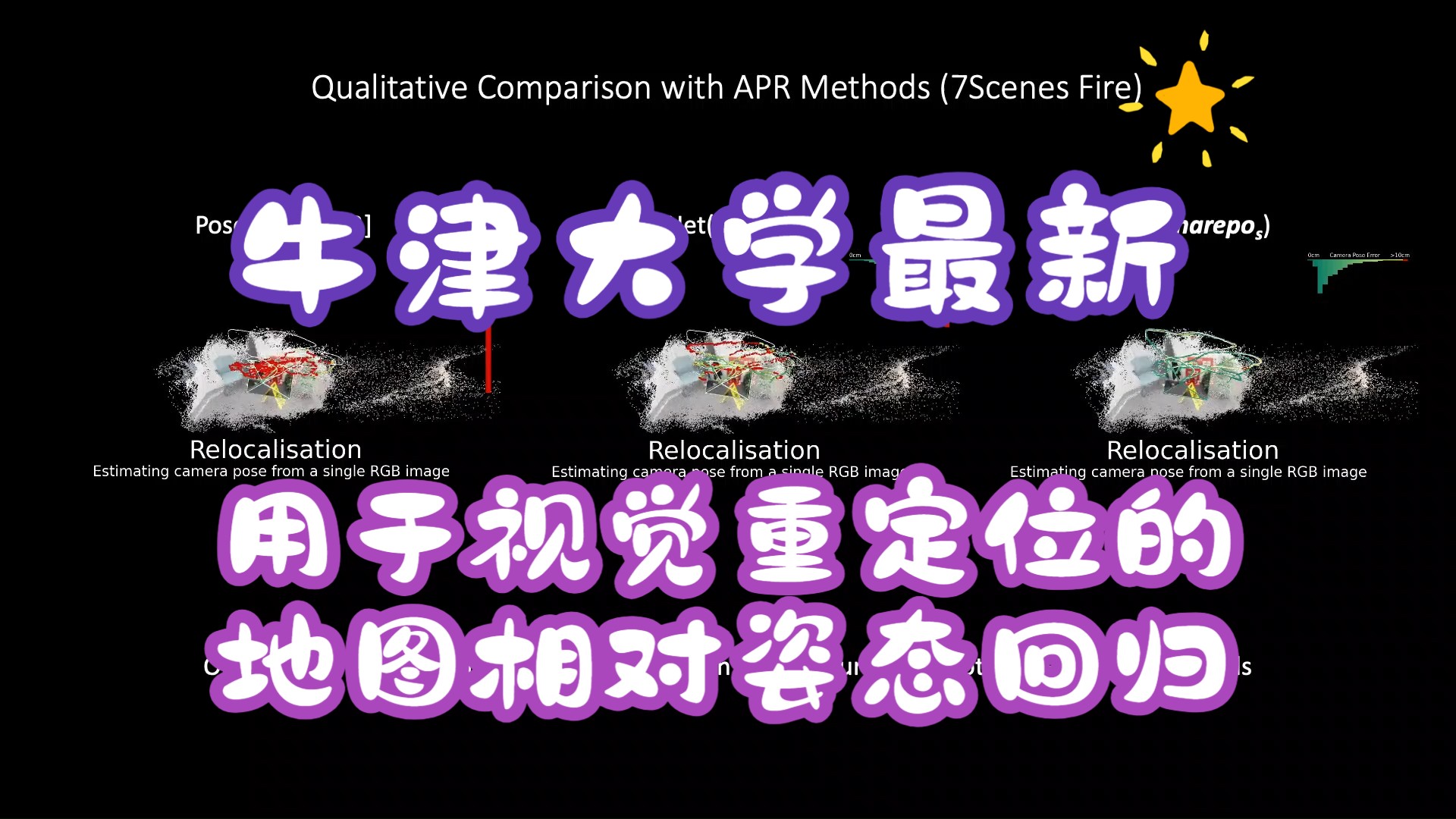
牛津大学最新!室内室外SOTA | 用于视觉重定位的地图相对姿态回归(CVPR'24 HighLight)
发布人
姿态回归网络预测查询图像相对于已知环境的相机姿态。在这一系列方法中,绝对姿态回归(APR)最近在几厘米的位置误差范围内显示出了很好的准确性。APR网络在其权重中隐式地对场景几何体进行编码。为了实现高精度,它们需要大量的训练数据,实际上,这些数据只能在长达几天的过程中使用新颖的视图合成来创建。对于每个新场景,必须一次又一次地重复此过程。我们提出了一种新的姿态回归方法,即映射相对姿态回归(marepo),它以场景不可知的方式满足了姿态回归网络的数据需求。我们在特定于场景的地图表示上调节姿势回归器,使其姿势预测相对于场景地图。这使我们能够在数百个场景中训练姿势回归器,以学习特定场景的地图表示和相机姿势之间的一般关系。我们的地图相对姿态回归器可以立即或在几分钟的微调后应用于新的地图表示,以获得最高精度。到目前为止,我们的方法在室内和室外两个公共数据集上都优于以前的姿态回归方法。 项目链接:https://nianticlabs.github.io/marepo/ 论文链接:https://arxiv.org/pdf/2404.09884.pdf
打开封面
下载高清视频
观看高清视频
视频下载器
牛津大学IROS2023最新!激光雷达相机外参标定新算法(大幅降低误差)
Waabi最新!UnO:用于感知和预测的SOTA模型(超越监督方式)
在线高精地图 | TopoMLP:驱动拓扑推理的简单而强大的pipeline
ETH最新!CVPR2024 | GoMVS:多视图几何重建新SOTA
港科技最新SLAM数据集!SLABIM:香港科技大学主楼SLAM-BIM耦合数据集
【ECCV2022】SOTA!MeshLoc:基于网格的视觉定位
【CVPR 2024 】ViDAR视觉点云预测赋能大规模端到端自动驾驶
牛津大学 | IMU+Lidar+GNSS的多传感器融合用于机器人的精准定位!
英伟达最新 | OmniDrive:用于3D感知、推理和规划功能的自动驾驶大语言模型
牛津大学CVPR2024 oral | MicKey:特征点检测方法,无需深度测量推断pose!
通过Intel Realsense 3D激光雷达完成SLAM任务!(性价比超高)
清华大学最新!GaussianFormer:Gaussians进军视觉Occupancy任务!
ICRA2022 | 基于图的多传感器融合在自动施工机器人一致定位中的应用
超逼真的数据!实时高质量渲染,用于动态城市场景建模的Street Gaussians
大幅超越SuperGlue!ICCV2023最新端到端特征匹配方法
香港大学最新!ROG-Map:一种基于LiDAR的高效机器人中心占用网格地图
KTH最新SOTA!大规模回环闭合 | 基于NeRF的稠密SLAM
CVPR 2023 | BEVHeight:基于视觉的道路3D目标检测的鲁棒框架
【IROS 2022】SOTA!基于粒子滤波的机器人定位和建图(浙大)
SOTA!ECCV2022 | 实现精确的主动相机定位(Camera Localization)
【空间计算】VIOBOT2 室内 定位 导航【里程计】【实测】
太强了!RenderOcc:仅使用2D标签和Nerf监督视觉Occupancy
太亮眼!CVPR 2024 自动驾驶方向中稿论文POSTER大全!
实时3D激光SLAM | 基于广义ICP和位姿图优化的实时无里程计方案(超赞!)
港大ArcLab重磅开源LVI-GS:3DGS紧耦合LiDAR-视觉-惯性SLAM!实时照片级建图!
2022最新!Nvidia完整阐释自动驾驶中的视觉感知(超赞技术)
视觉3D检测如何做自动标注?
CVPR2023最新!TBP Former:BEV下以视觉为中心的自动驾驶中的联合感知和预测网络
多摄像头多地图视觉惯性定位系统 (VILO):实时精准定位方案
CVPR 2023:VoxelNeXt:用于3D目标检测和跟踪的全稀疏新框架!
决策规划都有哪些框架?PNC今年的香饽饽!近10种规控算法与代码实现你都知道吗?
香港理工大学最新!Slamesh: 使用激光雷达传感器进行实时定位和网格划分
OmniDet:环视鱼眼多任务感知网络(深度估计、视觉里程计、语义和运动分割、目标检测和镜头污染检测)
2022最新!基于激光雷达的3D目标检测综述(超全数据集和SOTA方法汇总)
香港科技最新!Contour Context:3D激光雷达回环检测和度量姿态估计的抽象结构分布(ICLR2023)
ICCV2023 | MPOT:多平面目标跟踪
ICLR'24无图新思路!LaneSegNet:基于车道分段感知的地图学习(实时推理+三项SOTA)
最新多传感器融合数据集!Hilti SLAM Challenge Dataset(RAL-IROS 2022)
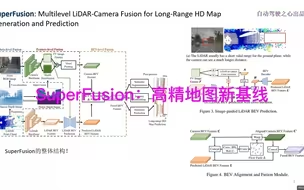
SuperFusion:高精地图新基线
元戎启行联手腾讯地图宣布2024年智能驾驶汽车发布合作