V
主页
视觉3D检测如何做自动标注?
发布人
视觉3D检测如何做自动标注?
打开封面
下载高清视频
观看高清视频
视频下载器
特斯拉的4D自动标注详解!为什么无标注数据work?
3D目标检测的数据标注/算法讲解/训练调优全系列闭环
特斯拉的World Model是什么?怎么做端到端训练?
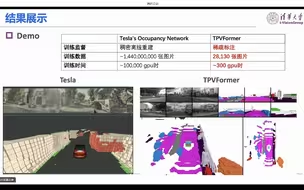
渲染速度提高5倍!GaussianOcc:借助3D GS,没有标注也能做Occ(东京大学)
Depth Anything V2 | 速度提升10倍以上!更稳健、精细的单目深度估计(HKU&TikTok)
TPVFormer:特斯拉occupany network的学术替代方案!清华大学工作
太强了!RenderOcc:仅使用2D标签和Nerf监督视觉Occupancy
自动驾驶中的多传感器融合都有哪些方法?基本流程都是什么?
大火的BEVFusion算法详解
【CVPR 2024 】ViDAR视觉点云预测赋能大规模端到端自动驾驶
【ECCV 2022】清华大学&字节跳动提出 ParticleSfM:从单目视频中估计运动相机的位姿
【地平线×自动驾驶之心】在线高精矢量化地图构建SOTA方案MapTR v1/v2、LaneGAP
【ICCV 2023】 Robust Depth:多种天气条件下的自监督单目深度估计新SOTA
OmniDet:环视鱼眼多任务感知网络(深度估计、视觉里程计、语义和运动分割、目标检测和镜头污染检测)
车道线检测的未来是MapFree吗?面向可量产方案总结
基于交互感知的自动驾驶车辆轨迹规划——神经网络与模型预估计控制的集成
2022最新 | HybridNets:端到端感知网络(检测+可行使区域分割+车道线三大任务)
自动驾驶仿真大观:聊聊仿真的研究背景
如何转行自动驾驶算法?后端开发转行到自动驾驶算法工程师
跟知乎大V一起来学BEV!视觉BEV感知和跟踪算法详解
毫米波雷达视觉到底是怎么融合的?CenterFusion你搞懂了吗?
车道线方案第一名!OpenLane Topology自动驾驶挑战赛(CVPRW2023)
轨迹规划新方案!基于差分平坦度的自动驾驶车辆轨迹规划
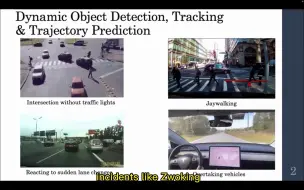
基于多传感器的自动驾驶动态目标检测、跟踪和轨迹预测
TensorRT部署车道线检测最强算法!Ultra-Fast-Lane-Detection-V2
CVPR 2023 | BEVHeight:基于视觉的道路3D目标检测的鲁棒框架
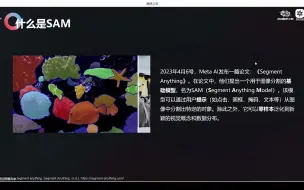
AI大模型上车第一步! SAM如何提升标注效率?
GPT-4V与自动驾驶更配?GPT-4V在自动驾驶中的早期探索!
自动驾驶中运动规划及控制的主要问题都有哪些?如何快速入门?
看完缓解了我的技术焦虑!自动驾驶的产线标定以及标定间标定方法
BEV-SAN:通过切片注意力网络实现精确的BEV 3D检测
世界模型!特斯拉CVPR2023 Workshop!
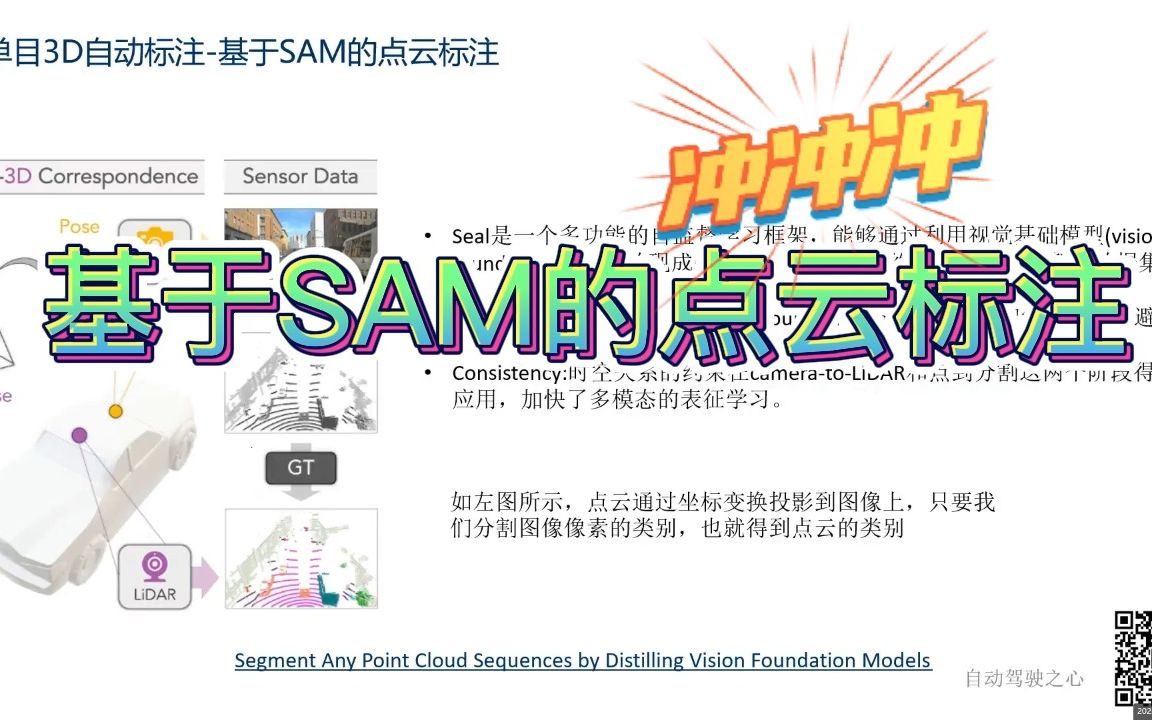
Segment Any Point Cloud:运用视觉基础模型分割一切点云
CVPR 2023 面向自动驾驶场景的纯视觉三维语义占有预测
端到端基础!绕不开的感知模块
自动驾驶汽车是如何在高精地图中建立精确位置的?
自动驾驶方向博士申请小白指南,看这个就够啦 !从论文准备到套磁导师!
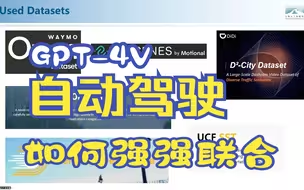
数据为王!自动驾驶开源数据体系现状与未来
从0到1!彻底搞懂BEVFormer算法原理
端到端算法有哪些优势?完爆传统感知规控?