V
主页
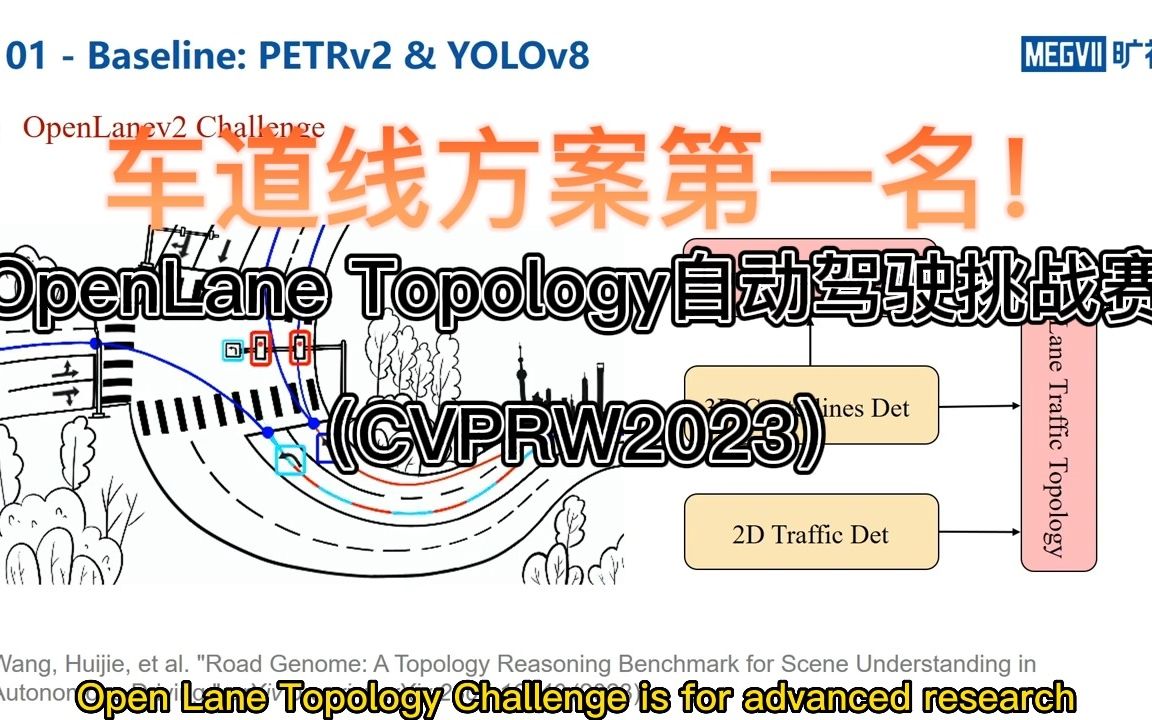
车道线方案第一名!OpenLane Topology自动驾驶挑战赛(CVPRW2023)
发布人
车道线方案第一名!OpenLane Topology自动驾驶挑战赛(CVPRW2023)
打开封面
下载高清视频
观看高清视频
视频下载器
车厂量产都在用的BEV车道线到底是什么?有什么优势?
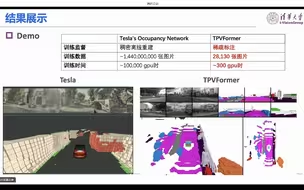
世界模型!特斯拉CVPR2023 Workshop!
自动驾驶中的多传感器融合都有哪些方法?基本流程都是什么?
量产和面试中遇到的那些车道线疑难问题!
自动驾驶中的多传感器融合有什么优势?如何快速入门到进阶?
来听大牛说!赵行老师在CVPR 2023年自动驾驶研讨会上发表的演讲
直播分享!最新SOTA,多模态3D目标检测新方案(CVPR2023)
什么是端到端自动驾驶?什么是基础world model?
车道线检测的未来是MapFree吗?面向可量产方案总结
TensorRT部署车道线检测最强算法!Ultra-Fast-Lane-Detection-V2
恶劣天气可拿捏不了我的鲁棒性!AAAI大佬来助攻
CVPR 2023 | BEVHeight:基于视觉的道路3D目标检测的鲁棒框架
CVPR2023 Nuplan自动驾驶轨迹规划比赛第二名方案详解
多传感器标定的工具箱有哪些?
【NeurIPS 2023】自动驾驶多模态感知蒸馏新方案来了!
看完缓解了我的技术焦虑!自动驾驶的产线标定以及标定间标定方法
CVPR2023 Highlight | Unisim:Nerf+自动驾驶,这不会是魔法吧?
太详细了!多传感器融合的策略和方法
数据为王!车道线数据高效生成策略有哪些?
【CVPR 2024 】ViDAR视觉点云预测赋能大规模端到端自动驾驶
端到端自动驾驶:SparseDrive 算法详解
经验之谈,轨迹预测真正重要的是什么?
端到端数据格式是什么样的?快来看看吧
为什么说规划控制仍然是端到端自动驾驶的核心?全面复盘规划控制基础及决策规划框架
自动驾驶的规划控制究竟在做什么?我们为什么需要规划控制
CVPR'23 | OCTraN:非结构化交通场景中的3D占用卷积Transformer网络
自动驾驶面试一百问!秋招社招全搞定
多模态3D检测相关2D和3D感知基础知识
比赛冠军方案!英伟达最新 | Hydra MDP:端到端多模态规划
Tesla FSD V13前瞻!
闭环驾驶SOTA!CarLLaVA: CARLA自动驾驶挑战赛2.0第一名方案!
自动驾驶假数据效果逆天了!Panacea:如何生成全景可控BEV感知数据?
高精地图制作关键技术及领域主流方案分享-part1
自动驾驶中的激光雷达点云分割-part2
如何从零搭建自己的自动驾驶C++功能模块?
Lidar vs. Tesla:自动驾驶路线之争!激光雷达还是纯视觉?
CVPR 2023 面向自动驾驶场景的纯视觉三维语义占有预测
CVPR 2023 | 从几何匹配一致的角度重新思考光流问题
讲明白了!端到端算法评估指标详解
CUDA编程实战教程之:流和事件!彻底搞懂~