V
主页
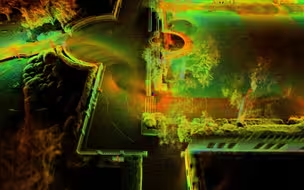
【WACV 2022】具有全局地图一致性的视觉导航的自监督域自适应
发布人
ppt链接:https://drive.google.com/file/d/1oeua_6aT6Ec9mnIeQrF2Um2bmCKwIMAO/view 我们为视觉导航代理提出了一种轻量级的、自监督的自适应,以推广到不可见的环境。给定在无噪声环境中训练的具体代理,我们的目标是将代理转移到存在驱动和里程计传感器噪声的噪声环境中。我们的方法鼓励代理最大化在往返轨迹中的不同时间步生成的全局地图之间的一致性。所提出的任务是完全自我监督的,不需要来自地面真实姿态数据或显式噪声模型的任何监督。此外,任务目标的优化是极其轻量级的,因为在商品GPU上的训练在几分钟内结束。我们的实验表明,所提出的任务有助于代理成功地转移到新的、有噪声的环境中。所转移的代理表现出改进的定位和映射精度,进一步提高了下游视觉导航任务的性能。此外,我们通过自我监督任务演示了测试时间自适应,以显示其在现实世界部署中的潜在适用性。
打开封面
下载高清视频
观看高清视频
视频下载器
【WACV2023】即插即用!频率感知自监督深度估计SOTA!
强烈推荐!国防科技大学OpenCV图像处理全套教程!终于有人将opencv讲透了!存下吧,比啃书好多了!机器视觉/人脸检测/计算机视觉/人工智能
基于MMyolo框架的YOLOv5+Deepsort的鸡蛋检测系统 | 多区域可选定多目标跟踪应用 代码开源
WACV 2022 | SIDE:具有结构感知实例深度估计的基于中心的立体3D目标检测器
IROS2022最新思路 | RCA:自监督学习实现视觉导航(具有驾驶舒适性)
绝对前沿!全面剖析自动驾驶具身理解任务!
最新!CoRL 2022 |Waymo分享自动驾驶行为 模型方案
2022最新!伯克利大学现代计算机视觉与深度学习系列课程(20):图像迁移
【NeurIPS 2022】Look Around and Refer:面向3D视觉的2D合成语义知识蒸馏
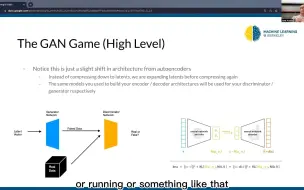
2022最新!伯克利大学现代计算机视觉与深度学习系列课程(10):生成式对抗网络
GAN最新研究趋势介绍:CVPR 2022中的StyleGAN
2022最新!伯克利大学现代计算机视觉与深度学习系列课程(12):扩散Diffusion
2022最新!伯克利大学现代计算机视觉与深度学习系列课程(7):深度学习下的目标检测
2022最新!伯克利大学现代计算机视觉与深度学习系列课程(9):VAE和VQ-VAE
ECCV 2022 Workshop: 自动驾驶视觉感知分享
自动驾驶的经济学!
大佬重讲OpenCV!这绝对是2024年最好的OpenCV入门教程!不接受任何反驳!
【ACCV 2022 Oral】SOTA!跨模态人群计数的空间通道注意力模块
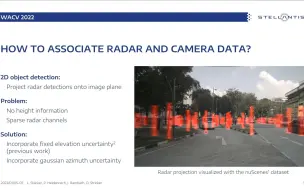
【WACV 2022】基于Radar-Camera融合的2D目标检测融合点云剪枝
CVPR 2023 | 协同感知在真实世界就不能打了?V2V4Real告诉你很能打!世界首款V2V协同感知数据集
地平线VAD又又又上新了!VADv2比v1强在哪里?一起来听
CoRL 2022 | 世界首款纯视觉协同感知方案是个啥?CoBEVT告诉你答案!
自动驾驶中的多传感器融合状态估计如何建模?
端到端算法是什么?自动驾驶领域是怎么做的?
iPhone16系列相机控制按键不好用?自适应单手自拍拇指按
2022最新!伯克利大学现代计算机视觉与深度学习系列课程(13):序列模型介绍
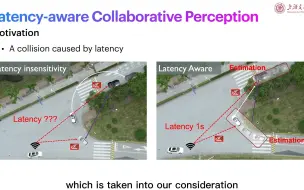
【ECCV 2022】SyncNet:Latency-Aware协作感知!(上交&上海AI Lab)
计算效率提升20% | 直接LiDAR-惯性里程计:具有连续时间运动校正的轻量级LiDAR-惯性里程计
当你在高铁上打开导航
ECCV2022 workshop | 自动驾驶中的自监督学习part2(数据处理、深度估计、3D检测/跟踪、SLAM、定位等!)
什么是端到端自动驾驶?什么是基础world model?
自动驾驶中的多传感器融合都有哪些方法?基本流程都是什么?
毫米波雷达-视觉融合感知方法(前融合/特征级融合/数据级融合)
关于自动驾驶的一切(层级划分/Lidar/Radar/视觉感知/AI与发展等)
YOLOv8+PSMNet+Deepsort,实现目标检测、追踪和测距!
【IROS2022】4D车载雷达自监督场景流估计SOTA!
CVPR 2023 | BEVHeight:基于视觉的道路3D目标检测的鲁棒框架
2022最新!伯克利大学现代计算机视觉与深度学习系列课程(3):深度学习介绍2
ECCV2022 | Box2Mask:强!mAP-50达到全监督97%!
ICLR'24无图新思路!LaneSegNet:基于车道分段感知的地图学习(实时推理+三项SOTA)