V
主页
京东 11.11 红包
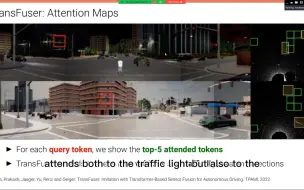
ECCV2022 workshop | 自动驾驶中的自监督学习part2(数据处理、深度估计、3D检测/跟踪、SLAM、定位等!)
发布人
ECCV2022 workshop | 自动驾驶中的自监督学习part2(数据处理、深度估计、3D检测/跟踪、SLAM、定位等!)
打开封面
下载高清视频
观看高清视频
视频下载器
ECCV2022 | 3D目标检难例挖掘首篇工作!(Wamyo出品,改进3D检测中的类内长尾)
自动驾驶缺少数据怎么办?ChatSim助你生成高度真实的驾驶数据!
CVPRW 2023 | 一种新的RGB+深度3D数据集,用于长范围目标跟踪应用
牛津大学最新!室内室外SOTA | 用于视觉重定位的地图相对姿态回归(CVPR'24 HighLight)
燃爆了!手工制作最快的自动驾驶小车
自动驾驶多传感器数据融合(4):多目标跟踪算法
Talk | 香港科技大学黄华健:高写实三维数字化时代下的在线同时定位和建图
自动驾驶多传感器数据融合(3):单目标跟踪算法
自动驾驶的规划控制究竟在做什么?我们为什么需要规划控制
AI小课堂 | 什么是深度估计?
自动驾驶中的多传感器融合状态估计如何建模?
【B站最全手撕transformer】transformer原理模型代码深度讲解+讲义+代码
决策规划都有哪些框架?PNC今年的香饽饽!近10种规控算法与代码实现你都知道吗?
多传感器融合!BEV感知融合算法介绍
自动驾驶绕不开的仿真!LightSim:从零开始搭建一个真实、可控、可扩展的自动驾驶仿真平台
为什么需要多传感器融合
IROS2022 | 毫米波雷达和相机融合在高分辨率和远距离深度成像中的探索
透彻!特斯拉occupancy network详解
ECCV 2022 Workshop: 自动驾驶视觉感知分享
端到端里程碑任务!UniAD算法详解来啦
最新多camera3D重建 !基于重聚焦事件融合的多事件相机深度估计与孤立点剔除(AISY 2022)
吹爆!面向深度学习的无人驾驶实战全套完整版,深度估计、车道线检测、轨道估计预测、TSDF等算法详解!真的比刷剧还过瘾!!!
常考题!目标跟踪中如何定义最优关联匹配?
太详细了!多传感器融合的策略和方法
UncertaintyTrack: 利用检测和定位不确定性进行多目标跟踪
数据为王!自动驾驶开源数据体系现状与未来
各位国之栋梁们来花20分钟学学最新的YOLO V11目标检测模型!效果确实还算不错啊!-神经网络/深度学习/计算机视觉
3D目标检测底层革新被ScartterFormer玩明白了!支持算子定制,实现灵活交互(ECCV2024 )
港科技最新SLAM数据集!SLABIM:香港科技大学主楼SLAM-BIM耦合数据集
IROS' 24 开源|GV-Bench:面向长期回环检测的几何验证评估
2022最新!基于激光雷达的3D目标检测综述(超全数据集和SOTA方法汇总)
【CVPR 2024】SIN-SLAM:基于神经隐式表征的稠密语义SLAM
2022最新!Nvidia完整阐释自动驾驶中的视觉感知(超赞技术)
IROS2022最新思路 | RCA:自监督学习实现视觉导航(具有驾驶舒适性)
为什么说规划控制仍然是端到端自动驾驶的核心?全面复盘规划控制基础及决策规划框架
强推!【视觉SLAM十四讲】全书讲解!清华大学原著大佬高翔亲授!真的让人醍醐灌顶!——(人工智能、深度学习、神经网络、Pytorch、OpenAI开发者大会)
NeRF如何监督Occupancy Networks?
2022最新!伯克利大学现代计算机视觉与深度学习系列课程(13):序列模型介绍
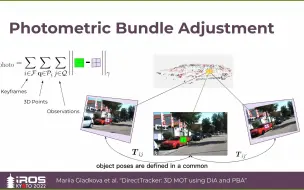
最新3D多目标跟踪方法DirectTracker:基于直接图像对齐和光度学束调整的3D多目标跟踪(IROS2022)
自动驾驶的经济学!