V
主页
京东 11.11 红包
关于自动驾驶的一切(层级划分/Lidar/Radar/视觉感知/AI与发展等)
发布人
关于自动驾驶的一切(层级划分/Lidar/Radar/视觉感知/AI与发展等)
打开封面
下载高清视频
观看高清视频
视频下载器
02 自动驾驶中常用传感器硬件介绍(Camera + LiDAR + Radar + IMU)(上篇)
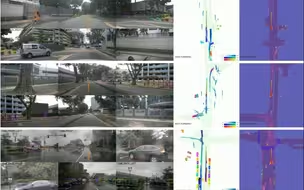
IROS2022 | 毫米波雷达和相机融合在高分辨率和远距离深度成像中的探索
毫米波雷达-视觉融合感知方法(前融合/特征级融合/数据级融合)
【IROS2022】MPC-PF:使用势场的自动驾驶动态目标的社会交互感知轨迹预测
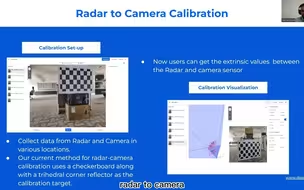
史上最全 | 自动驾驶中的多传感器标定校准(Lidra/Radar/Camera/Stereo/IMU等)
自动驾驶如何学好C++?
Lidar vs. Tesla:自动驾驶路线之争!激光雷达还是纯视觉?
太详细了!多传感器融合的策略和方法
没有BEV特征如何做BEV感知?(旷视团队分享PETRv2/StreamPETR/CMT等SOTA方案)
自动驾驶绕不开的仿真!LightSim:从零开始搭建一个真实、可控、可扩展的自动驾驶仿真平台
ICRA2023 | 激光雷达相机内外参联合标定方案!
港科大最新!Vista:高保真度、通用可控性的自动驾驶世界模型
基于交互感知的自动驾驶车辆轨迹规划——神经网络与模型预估计控制的集成
端到端自动驾驶:SparseDrive 算法详解
轻舟智航最新成果!PillarNeXt:LiDAR点云中的3D检测网络如何设计?
跟知乎大V一起来学BEV!视觉BEV感知和跟踪算法详解
【NeurIPS 2023】自动驾驶多模态感知蒸馏新方案来了!
学完即可就业!一口气刷完3D点云、车道线检测、轨迹预测、三维重建、环境感知、深度估计、关键点特征匹配、行人重识别等八大自动驾驶算法与实战!真的比刷剧还爽!
自动驾驶中的多传感器融合都有哪些方法?基本流程都是什么?
UC伯克利最新!S3Gaussian:全球首个开源的自动驾驶场景3D GS工作
毫米波雷达视觉到底是怎么融合的?CenterFusion你搞懂了吗?
自动驾驶汽车是如何在高精地图中建立精确位置的?
上海AI Lab最新!Depth any Video:提升深度估计的一致性以及合成更多真实带有标注的数据
牛津大学IROS2023最新!激光雷达相机外参标定新算法(大幅降低误差)
路径规划|基于维诺图的路径规划算法(ROS C++/Python/Matlab实现)
绝对前沿!全面剖析自动驾驶具身理解任务!
太强了!RenderOcc:仅使用2D标签和Nerf监督视觉Occupancy
数据太逼真了!DriveDreamer:走向真实世界驱动的自动驾驶世界模型
OmniDet:环视鱼眼多任务感知网络(深度估计、视觉里程计、语义和运动分割、目标检测和镜头污染检测)
【CoRL2022】路径规划新SOTA!PlanT:通过目标级表示的可解释的规划Transformers
GPT-4V与自动驾驶更配?GPT-4V在自动驾驶中的早期探索!
浙江大学最新 | BEVPlace++:激光雷达全局定位方法,超越当前SOTA!泛化性能极佳
R3LIVE++:一个实时鲁棒的紧耦合激光雷达-惯性-视觉融合框架
CVPR2023最新!TBP Former:BEV下以视觉为中心的自动驾驶中的联合感知和预测网络
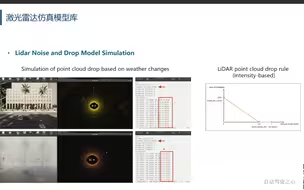
【ICRA 2023 | 首篇研究LiDAR基础设施部署的工作!作者亲自带你玩转传感器部署策略】第2节:高一致性传感器仿真模型库
地平线VAD又又又上新了!VADv2比v1强在哪里?一起来听
端到端算法是什么?自动驾驶领域是怎么做的?
终生SLAM框架!BioSLAM:用于一般地点识别的仿生终身记忆系统
Hydra MDP | 英伟达如何理解端到端自动驾驶?
在线高精地图与城市NOA是什么关系?为什么如此重要?