V
主页
京东 11.11 红包
ECCV 2022 Workshop: 自动驾驶视觉感知分享
发布人
公众号【自动驾驶之心】后台回复‘ECVW22‘获取论文代码链接!学习鲁棒的自动驾驶策略,ECCV 2022 Workshop: 自动驾驶视觉感知分享
打开封面
下载高清视频
观看高清视频
视频下载器
毫米波雷达-视觉融合感知方法(前融合/特征级融合/数据级融合)
太详细了!多传感器融合的策略和方法
TensorRT部署车道线检测最强算法!Ultra-Fast-Lane-Detection-V2
端到端基础!绕不开的感知模块
ECCV2022 workshop | 自动驾驶中的自监督学习part1(数据处理、深度估计、3D检测/跟踪、SLAM、定位等!)
2022最新!Nvidia完整阐释自动驾驶中的视觉感知(超赞技术)
直播分享!最新SOTA,多模态3D目标检测新方案(CVPR2023)
基于地形的路径规划案例
毫米波雷达视觉算法CRAFT,这次彻底理解了!
自动驾驶仿真框架CARLA教程(3):Car Agent强化学习环境
多传感器融合!BEV感知融合算法介绍
没有BEV特征如何做BEV感知?(旷视团队分享PETRv2/StreamPETR/CMT等SOTA方案)
自动驾驶中的激光雷达点云分割-part2
World Model!大火的世界模型到底是什么?
实时3D目标检测 | 利用稀疏表示来提高嵌入式系统上3D目标检测模型的运行速度!
自动驾驶中的多传感器融合都有哪些方法?基本流程都是什么?
BEV-SAN:通过切片注意力网络实现精确的BEV 3D检测
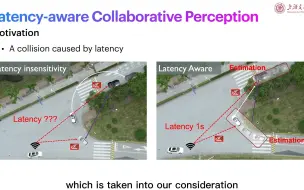
【ECCV 2022】SyncNet:Latency-Aware协作感知!(上交&上海AI Lab)
MonoPLFlowNet:用于单目图像的现实尺度 3D 场景流估计(ECCV2022)
详解!基于Camera和基于激光雷达的自动驾驶系统区别!
看完缓解了我的技术焦虑!自动驾驶的产线标定以及标定间标定方法
卧槽!这么好的【无人驾驶技术】全套教程不能只让我一个人学习,感知实战、视觉定位、路径规划、预测系统,翻遍全网找不到比这更详细的了!!!(自动驾驶/人工智能AI)
在线高精地图与城市NOA是什么关系?为什么如此重要?
端到端算法是什么?自动驾驶领域是怎么做的?
ECCV2022 workshop | 自动驾驶中的自监督学习part2(数据处理、深度估计、3D检测/跟踪、SLAM、定位等!)
为什么需要多传感器融合
ParkingE2E:纯视觉端到端泊车网络(秦通团队出品)
看到了这个视频,彻底搞懂了PETR算法!
什么是端到端自动驾驶?什么是基础world model?
ICRA2023 | 激光雷达相机内外参联合标定方案!
搞懂了!原来激光雷达和相机的内外参是这样标定的
Waabi最新!UnO:用于感知和预测的SOTA模型(超越监督方式)
CVPR2023最新!TBP Former:BEV下以视觉为中心的自动驾驶中的联合感知和预测网络
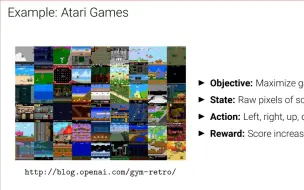
自动驾驶保姆级入门课程系列(4):强化学习方法
LeTS-Drive:自动驾驶中不确定场景下的实时路径规划算法
3D目标检测的数据标注/算法讲解/训练调优全系列闭环
3D目标检测底层革新被ScartterFormer玩明白了!支持算子定制,实现灵活交互(ECCV2024 )
L4自动驾驶感知的终极形态会是协同感知吗?UCLA顶级博士告诉你答案!
GPT-4V与自动驾驶更配?GPT-4V在自动驾驶中的早期探索!
白天图像变夜晚数据SOTA方法| ManiFest:图像翻译新思路!(ECCV2022)