V
主页
IROS2022最新思路 | RCA:自监督学习实现视觉导航(具有驾驶舒适性)
发布人
论文链接:https://arxiv.org/abs/2207.14460 视频链接:https://www.youtube.com/watch?v=DxT-DNFS3mk 在共享自主下,轮椅使用者期望车辆在遵循使用者高级导航计划的同时提供安全舒适的乘坐。为了找到这样一条路径,车辆需要在不同的地形上进行折衷选择,并评估其穿越难度。大多数现有工作通过几何表示或语义分类对周围环境进行建模,这并不反映下游导航任务中感知的运动强度和乘坐舒适度。我们建议在使用本体感知的可通过性分析中显式模拟乘坐舒适性。我们开发了一个自监督学习框架,通过利用车辆状态作为训练信号,从第一人称视图图像预测可通过性成本图,我们的方法基于地形外观估计车辆在穿越时的感觉。然后,我们通过机器人实验和人类评估研究表明,我们的导航系统提供了人类偏好的乘坐舒适性。
打开封面
下载高清视频
观看高清视频
视频下载器
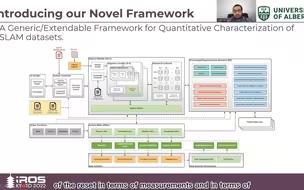
IROS2022 | 我们准备好进行鲁棒且有弹性的SLAM了吗?
牛津大学IROS2023最新!激光雷达相机外参标定新算法(大幅降低误差)
IROS2022 | MIMOSA:针对传感器退化的多模态SLAM框架
实时3D激光SLAM | 基于广义ICP和位姿图优化的实时无里程计方案(超赞!)
通过Intel Realsense 3D激光雷达完成SLAM任务!(性价比超高)
超全干货 | 自动驾驶中的传感器融合:前融合+后融合+特征级融合(方法与策略)
麻省理工团队 | Fast-LiDARNet:基于激光雷达的高效鲁棒端到端导航框架
ParkingE2E:纯视觉端到端泊车网络(秦通团队出品)
Nerf+SLAM会擦出什么样的火花?
YOLOv11+双目立体匹配融合,进行实例分割、测距和点云重建!
牛津大学最新!室内室外SOTA | 用于视觉重定位的地图相对姿态回归(CVPR'24 HighLight)
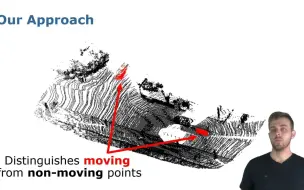
IROS2022最新 | 基于激光雷达的三维运动目标分割的高效时空信息融合
ICRA2022 | 基于图的多传感器融合在自动施工机器人一致定位中的应用
自动驾驶多传感器数据融合(1):什么是多传感器融合?
【IROS2022】超酷Demo | 使用稀疏4D卷积分割点云中的移动物体
支持在线时空标定!高效多传感器辅助惯性导航系统(ICRA2021)
性能提升近40%!ViPlanner:室内外局部导航全搞定(ICRA 2024)
RTABMAP算法激光视觉融合SLAM
最新!如何使用深度强化学习在未知环境中进行导航?
港科大最新!Vista:高保真度、通用可控性的自动驾驶世界模型
端到端算法是什么?自动驾驶领域是怎么做的?
CVPR 2023最新!基于NeRF监督的深度立体视觉
SemanticKITTI SOTA!激光雷达数据中的运动目标分割(IROS2022)
端到端算法有哪些优势?完爆传统感知规控?
牛津机器人研究所分享最新SLAM算法及其前沿设备
毫米波雷达-视觉融合感知方法(前融合/特征级融合/数据级融合)
面向下一代自动驾驶:全栈里程碑综述汇总
没有BEV特征如何做BEV感知?(旷视团队分享PETRv2/StreamPETR/CMT等SOTA方案)
NeRF如何监督Occupancy Networks?
ECCV 2022最新 | DynamicDepth:无监督多帧单目深度估计新SOTA!
03 自动驾驶中多传感器同步理论(Camera + LiDAR + Radar + IMU)(上篇)
CVPR2022 oral | 弱监督Lidar点云分割SOTA!8% 标注数据下达到 95.7% 的全监督性能!
专注于学习PnC的端到端方法详解
端到端基础!绕不开的感知模块
香港大学最新!ROG-Map:一种基于LiDAR的高效机器人中心占用网格地图
视觉3D检测如何做自动标注?
什么是端到端自动驾驶?什么是基础world model?
【ECCV 2022】显著减少自动驾驶碰撞率!可微分光线投射应用于自监督占位预测
Lidar vs. Tesla:自动驾驶路线之争!激光雷达还是纯视觉?
World Model!大火的世界模型到底是什么?