V
主页
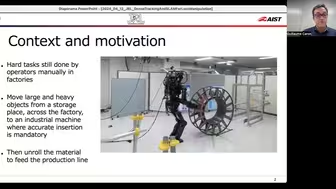
Humanoid robot research result highlights in 2022- CNRS-AIST JRL
发布人
https://www.youtube.com/watch?v=LFVdx5Nssh8 https://www.youtube.com/watch?v=LFVdx5Nssh8
打开封面
下载高清视频
观看高清视频
视频下载器
人形机器人足底机械结构设计
00:00 9 款即将在生活工作中见到人形机器人
High-Power, Flexible, and Robust Musculoskeletal Hand (IROS 2017)
ICRA 24 Convergent iLQR for Safe Trajectory Planning and Control of Legged Robot
Go2开发教学05-底层服务接口
【人形机器人仿真】这走路姿势比我都标准
Reinforcement learning for blind stair climbing with legged and wheeled robot
intro install and setup ROS2 humble P1
我们把机器人拉出门散了个步,还是原来的模型,没有新训练 [Humanoid Parkour Learning]
Humanoid Loco-Manipulations ... 3D Tracking and SLAM with Wide-Angle Depth-Image
Go2使用教学05-运动姿态介绍
适用于人形和四足的仿真器 The Simple Simulator 最新成果 去简介github 地址试用下吧
双足机器人步态生成 MATLAB and Simulink
Highly dynamic gaits controlled by a whole-body MPC
具有闭合/并行运动链的人形机器人的全身控制WBC:袋鼠案例研究
Learning whole-body manipulation for quadrupedal robot
Go2使用教学10-编程模式
(submit to IROS 24) A Single-Leg Robot that Mimics the Human Leg and Toe
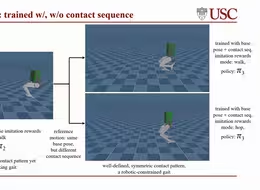
基于学习的多模式双足运动和隐式转换:一种多功能的策略方法
人形机器人灵巧手臂最新成果
Go2使用教学07-伴随教程
BRUCE Got Spot-ted at ICRA2024(标题谐音梗不翻译了各位自行体会)
qpSWIFT : A Real-time Sparse Quadratic Program Solver for Robotic Applications
电流可达210A微型直流驱动器,最高可达300A,用于军工,转台,机器人#机器人 #驱动器 #仿人机器人
EAGLE: The First Event Camera Dataset Gathered by an Agile Quadruped Robot
DeepMind x UCL RL Lecture Series - Exploration & Control 2
(T-RO 23) An Efficient Paradigm For Feasibility Guarantees For Legged Robots
波士顿动力 四足机器人Spot-工业检测机器人解决方案-化工厂场景
overcoming the practical challenges when using reinforcement learning
Deep Compliant Control for Legged Robots
基于国产银河大模型驱动的盖博特机器人来了#人工智能 #AI #大模型 #机器人
ICRA 24 | Sim-To-Real Learning for Humanoid Box Loco-Manipulation
8分钟内了解波士顿动力机器人30年的整个演变
(ICRA 24)A Lightweight Free-Climbing Robot for Extreme Terrain Exploration
Model and data, two essential ingredients for controlling legged robot
Go2开发教学07-实验示例一,遥控器切换运控
Large-scale policy training for robots -Jemin Hwangbo (KAIST)
Go2使用教学03-OTA固件升级
写了一个人形机器人仿真,适用5或者6自由度的腿形
Spot 自主乘坐电梯和开门