V
主页
(ICRA 24)A Lightweight Free-Climbing Robot for Extreme Terrain Exploration
发布人
https://www.youtube.com/watch?v=fVHRZc-jPCw LORIS: A Lightweight Free-Climbing Robot for Extreme Terrain Exploration Paul Nadan, Spencer Backus, and Aaron M. Johnson Conference Paper, Proceedings of (ICRA) International Conference on Robotics and Automation, May, 2024 View Publication Abstract Climbing robots can investigate scientifically valuable sites that conventional rovers cannot access due to steep terrain features. Robots equipped with microspine grippers are particularly well-suited to ascending rocky cliff faces, but most existing designs are either large and slow or limited to relatively flat surfaces such as walls. We present a novel free-climbing robot to bridge this gap through innovations in gripper design and force control. Fully passive grippers and wrist joints allow secure grasping while reducing mass and complexity. Forces are distributed among the robot's grippers using an optimization-based control strategy to minimize the risk of unexpected detachment. The robot prototype has demonstrated vertical climbing on both flat cinder block walls and uneven rock surfaces in full Earth gravity. paper link: https://www.ri.cmu.edu/publications/loris-a-lightweight-free-climbing-robot-for-extreme-terrain-exploration/
打开封面
下载高清视频
观看高清视频
视频下载器
写了一个人形机器人仿真,适用5或者6自由度的腿形
MuJoCo 仿真 案例欣赏
模型预测控制 (MPC) 从推导到C++ 实现,详细教程 仅使用 Eigen 库 代码在简介
通过优化理论指导设计双足以达到控制和任务的最优
人形机器人足底机械结构设计
ETH 最新RL成果,已开源!SMUG 规划器:适用于具有挑战性环境下的移动机器人的安全多目标规划器
真牛!这个人形机器人吊打很多厂家的“产品”
TinyMPC model-predictive-control-on-resource-constrained-microcontrollers
呐, 这就叫优雅~
(Humanoid)An IntegratedForceSensitive, Impedance Controlled, Tendon-Driven Wrist
差点以为 你真的不会动呢
[动漫]机械娘损坏场景 35
Conflict-based Model Predictive Control for Scalable Multi-Robot Motion Planning
(ICRA 2024) Actor-Critic Model Predictive Control
波士顿动力也上强化学习了,很强!Reinforcement Learning with Spot _ Boston Dynamics
人形机器人盲上16cm楼梯仿真
High-Power, Flexible, and Robust Musculoskeletal Hand (IROS 2017)
SpotMini nimble robot by Boston Dynamics
solving the walking robot problem with reinforcement learning
(RA-L 23) Reactive Landing Controller for Quadruped Robots
四足机器人(ANYmal B)+ 机械臂(Gen2 ) rviz 可视化 后续还有很多工作要做,more work will be coming!!!
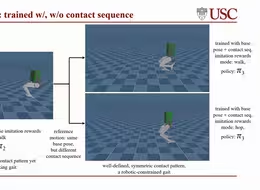
基于学习的多模式双足运动和隐式转换:一种多功能的策略方法
Ghost Robotics 四足机器人 专注特定领域 【狗头】
A Feasibility-Driven Approach to Control-Limited DDP
Reinforcement learning for blind stair climbing with legged and wheeled robot
The MIT Humanoid Robot Design Motion Planning and Control ForAcrobatic Behaviors
四足机器人控制器分享(webots+matlab)
印度的四足机器人 看着还可以哦
qpSWIFT : A Real-time Sparse Quadratic Program Solver for Robotic Applications
Safety-Critical Control of Autonomous Systems -Aaron Ames
赛博狗子 机械飞升 Bio-inspired Musculoskeletal Soft Quadruped Robot
人形机器人顶级学术会议,你投稿了吗?接下来几天分享相关会议论文吧哈哈哈哈哈哈
CasADi 3.6 tutorial (C++ Matlab Python)
波士顿动力机器人 Atlas | 真正继承者 Nadia | 其他机器人靠边站
你感觉到机器人的恐怖如斯了吗?未来已来
呐,这就叫优雅!这就叫专业! Boston Dynamic Spot
【论文复现】移动机械臂协同控制(八)——在Gazebo上实现UR5e_Tracer_Robot控制
(T-RO 23) An Efficient Paradigm For Feasibility Guarantees For Legged Robots
Whole-body MPC for highly redundant legged manipulators
Part 2 - How to Solve Inverse Kinematics of a 4 Leg Robot