V
主页
EAGLE: The First Event Camera Dataset Gathered by an Agile Quadruped Robot
发布人
https://www.youtube.com/watch?v=omKm7HxzPkM EAGLE: The First Event Camera Dataset Gathered by an Agile Quadruped Robot Shifan Zhu, Zixun Xiong, Donghyun Kim When legged robots perform agile movements, traditional RGB cameras often produce blurred images, posing a challenge for accurate state estimation. Event cameras, inspired by biological vision mechanisms, have emerged as a promising solution for capturing high-speed movements and coping with challenging lighting conditions, owing to their significant advantages, such as low latency, high temporal resolution, and a high dynamic range. However, the integration of event cameras into agile-legged robots is still largely unexplored. Notably, no event camera-based dataset has yet been specifically developed for dynamic legged robots. To bridge this gap, we introduce EAGLE (Event dataset of an AGile LEgged robot), a new dataset comprising data from an event camera, an RGB-D camera, an IMU, a LiDAR, and joint angle encoders, all mounted on a quadruped robotic platform. This dataset features more than 100 sequences from real-world environments, encompassing various indoor and outdoor environments, different lighting conditions, a range of robot gaits (e.g., trotting, bounding, pronking), as well as acrobatic movements such as backflipping. To our knowledge, this is the first event camera dataset to include multi-sensory data collected by an agile quadruped robot. https://arxiv.org/abs/2404.04698
打开封面
下载高清视频
观看高清视频
视频下载器
00:00 9 款即将在生活工作中见到人形机器人
幽灵机器人 Ghost Robotics - Vision 60
(T-RO 24)Tube Acceleration:Robust Dexterous Throwing against Release Uncertainty
Tutorial - Crocoddyl - Nicolas Mansard
Deep Compliant Control for Legged Robots
8分钟内了解波士顿动力机器人30年的整个演变
人形机器人3d 打印手臂 网址在简介 欢迎关注三连
(ICRA 24)A Lightweight Free-Climbing Robot for Extreme Terrain Exploration
模型预测控制简介
intro install and setup ROS2 humble P1
DeepMind x UCL RL Lecture Series - Exploration & Control 2
Vision-Based Terrain-Aware Locomotion for Legged Robots ---T-RO
真牛!这个人形机器人吊打很多厂家的“产品”
猜猜这个人形机器人下半身方案中的两个踝关节电机藏在何处
这下真狗了 Boston Dynamics
Spot 自主乘坐电梯和开门
电流可达210A微型直流驱动器,最高可达300A,用于军工,转台,机器人#机器人 #驱动器 #仿人机器人
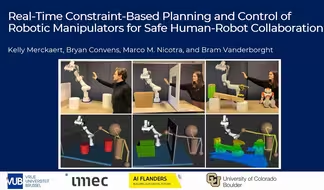
Real-Time Constraint-Based Planning and Control of Robotic Manipulators
WoCoCo:通过顺序接触学习全身人形机器人控制|2024【卡内基·梅隆大学】
SCIENCE ROBOTICS: Dynamic locomotion synchronization via bilateral tele
ETH 最新Science Robotics基于学习的轮腿机器人自主导航和运动
Unitree H1跳一跳
波士顿动力机器人炫舞 Robot Dance
BRUCE Got Spot-ted at ICRA2024(标题谐音梗不翻译了各位自行体会)
Online trajectory optimization for dynamic aerial motions of a quadruped robot
Go2使用教学08-笨笨狗
Reinforcement learning for blind stair climbing with legged and wheeled robot
ETH 最新Science Robotics基于学习的轮腿机器人自主导航和运动
what is reinforcement learning
Large-scale policy training for robots -Jemin Hwangbo (KAIST)
overcoming the practical challenges when using reinforcement learning
(submit to IROS 24) A Single-Leg Robot that Mimics the Human Leg and Toe
Conflict-based Model Predictive Control for Scalable Multi-Robot Motion Planning
转行人形机器人
Go2使用教学07-伴随教程
Bipedal Safe Navigation over Uncertain Rough Terrain
【人形机器人仿真】这走路姿势比我都标准
write a ROS2 subscriber with Python P8
人形机器人足底机械结构设计
当人工智能来临的时候,我们应该做什么。