V
主页
ORB-SLAM3系列之特征匹配(三 MLPnP,词袋模型)
发布人
大纲: 1、前节回顾 2、特征匹配算法中的方向一致性检验 3、MLPnP算法理论推导及代码解析(ORB-SLAM3创新点) 4、词袋模型在特征匹配中的使用 5、讨论交流(如何有效阅读文献)
打开封面
下载高清视频
观看高清视频
视频下载器
ORB-SLAM3基本原理与系统架构
LightGlue:最强轻量级特征匹配?
(公开课)视觉SLAM原理与ORB-SLAM3系列算法
最新CVPR2020论文:SuperGlue(超级胶水):用图神经网络来做图像匹配,超越现有所有匹配算法
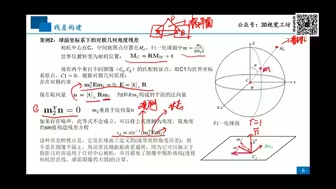
相机标定的基本原理与经验分享
CVPR2023开源 无纹理和重复纹理也能实现鲁棒的特征匹配!
SLAM里程碑!戴森机器人实验室最新开源:3D GS杀入SLAM!
3D Gaussian Splatting还能更快吗?200+FPS!15倍压缩!
HeadCraft-超逼真头部细微特征生成!3DMM的革命!
【3D视觉工坊】第八期公开课:立体视觉之立体匹配理论与实战
CVPR'24开源|NeRF-SLAM新SOTA:请任意选择你的高效神经
大作业|激光-视觉-IMU-GPS融合SLAM算法
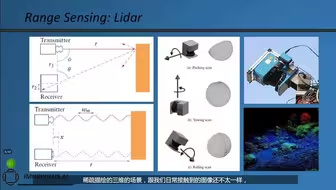
激光-视觉-IMU-GPS融合SLAM系列课程-传感器介绍与代表性SLAM解析
单目深度估计绪论
点云3D深度学习模型与实践
MIT重磅开源!别再用COLMAP了!FlowMap给你最精确的SfM!
吊打ORB3!73Hz!南洋理工重磅开源AirSLAM:无惧复杂光照的超强点线视觉SLAM!
三维点云系列视频——第一章绪论
代码开源!伦敦大学学院:DSP-SLAM:物体特征级SLAM
CVPR满分论文!即插即用的6D物体姿态估计大模型(BOP排行榜第一)
清华最新开源万能3D分割一切!
浙大+商汤联合工作,LoFTR:利用transformers对稀疏纹理进行匹配(CVPR2021)
如何高效学习单目深度估计?
如何进行三维重建?从单帧深度估计到完整模型重建
学习教程:点云匹配-正态分布变换NDT(Normal Distributions Transform)算法
重磅开源!连你的微表情都可以轻松还原!SMIRK超强3D面部重建技术!
从零搭建一套结构光3D重建系统 [理论+源码+实践]
C++|CmakeLists编写规则
最新ICCV2021论文,基于分层内存匹配网络的视频对象分割
BEV&Occ提升颗粒度的方案
GS-SLAM:具有3D高斯溅射的稠密视觉SLAM
MIT最新突破!SplaTAM:实现高速SLAM与实时3D渲染的全新方法!
ECCV'24开源 | 又快又好!6DGS重新定义6D物体位姿估计!
小白如何手写g2o优化? 残差构建、雅克比推导、优化函数
最新CVPR2020论文:Deep Global Registration基于深度学习的3D点云全局匹配:!
Depth Anything!最强开源单目深度估计SOTA!
KITTI上准确率第二,具有GPU加速GICP匹配代价因子的全局一致的3D LiDAR映射
光学3D测量技术原理及应用
自动驾驶中的视觉感知技术
ECCV'24开源 | 拳打ORB3脚踢DROID!强化学习+VO=精度暴涨19%!