V
主页
自动驾驶仿真大观:仿真软件到中间件,一个视频彻底搞懂!
发布人
Carla-Autoware联合仿真实战,课程链接:https://wrzpl.xetslk.com/s/1mVJYs 自动驾驶之心官网正式上线了:www.zdjszx.com(海量视频教程等你来学) 1、面向自动驾驶与c++全栈教程(视频➕答疑) 2、Carla—Autoware联合仿真实战(视频➕答疑) 3、在线高精地图与自动驾驶论文带读教程 4、国内首个基于Transformer的分割检测➕视觉大模型课 5、国内首个大模型与自动驾驶应用论文带读教程 6、世界模型与自动驾驶论文带读课程(视频+答疑) 7、Occupancy从入门到精通全栈课程(理论➕实战) 8、自动驾驶中的多传感器融合与目标跟踪(从入门到精通) 9、国内首个多模态3D目标检测全栈教程(前融合/特征级融合/后融合) 10、YOLOv3~YOLOv8/YOLOX/PPYOLO系列全栈学习教程 11、国内首个BEV感知全栈学习教程(纯视觉+多传感器融合方案) 12、多传感器融合中的毫米波雷达-视觉融合感知全栈教程 13、Lidar+Radar+Camera+IMU离线/在线近20+标定方案教程等你来学 14、模型部署实战:基于TensorRT的CNN/Transformer/检测/BEV模型四大部署代码+CUDA加速 15、规划控制理论&实战课程:PID、LQR、MPC全掌握 16、国内首个工业级车道线检测课程,从单目2D、单目3D到BEV车道线!!! 17、国内首门面向量产的单目3D与单目BEV感知教程!!! 18、Nerf与自动驾驶论文带读课程!!! 19、轨迹预测理论+实战教程!!! 20、轨迹预测与自动驾驶论文带读课程!!! 21、点云3D目标检测理论与实战教程!!! 22、国内首门毫米波&4D毫米波雷达理论实战教程!!! 课程咨询联系AIDriver004,科研合作及辅导联系AIDriver002。
打开封面
下载高清视频
观看高清视频
视频下载器
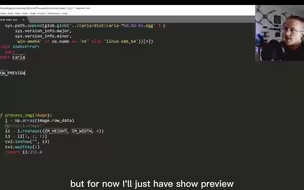
自动驾驶仿真框架CARLA教程(6):Longer-term model results
萝卜快跑,是开端还是结局 | 无人驾驶迎来新篇章
自动驾驶中的多传感器融合状态估计如何建模?
港科大最新!Vista:高保真度、通用可控性的自动驾驶世界模型
大牛带你彻底搞懂UltraFastLane车道线检测算法(一)
端到端趋势下,传统规控还有未来么?
什么是端到端自动驾驶?什么是基础world model?
自动驾驶仿真框架CARLA教程(3):Car Agent强化学习环境
特斯拉无人驾驶出租车曝光!L5级自动驾驶!座位可旋转!
不用等10/10,特斯拉无人出租车三大创新提前剧透
UC伯克利最新!S3Gaussian:全球首个开源的自动驾驶场景3D GS工作
为什么自动驾驶离不开模型部署?
端到端算法是什么?自动驾驶领域是怎么做的?
CNN&Transformer如何高效部署?大牛带你彻底搞懂!
理想万人公测的这版端到端自动驾驶到底怎么样?
经验之谈,轨迹预测真正重要的是什么?
端到端算法有哪些优势?完爆传统感知规控?
自动驾驶中的多传感器融合都有哪些方法?基本流程都是什么?
特斯拉的World Model是什么?怎么做端到端训练?
轨迹预测真正重要的什么?又或者说实际落地的难点在哪里?
搞懂了!原来激光雷达和相机的内外参是这样标定的
为什么说规划控制仍然是端到端自动驾驶的核心?全面复盘规划控制基础及决策规划框架
自动驾驶规划控制的未来是什么?
FSD V12.5.4测评 ASS(增强智能召唤)
自动驾驶方向博士申请小白指南,看这个就够啦 !从论文准备到套磁导师!
为什么说自动驾驶离不开模型量化?
『汽车人有话说』试驾都要排队的小米,自动驾驶到底行不行
看完缓解了我的技术焦虑!自动驾驶的产线标定以及标定间标定方法
端到端基础!从原始传感器数据到控制策略
BEVCar:SOTA!RV融合完成地图和分割双任务
BFS是个啥?为什么规划控制需要它?
重磅开源!MARS:基于隐式场的场景感自动驾驶仿真
讲明白了!端到端算法评估指标详解
多传感器融合!BEV感知融合算法介绍
登顶Nature!带事件摄像机的低延迟自动驾驶视觉新方案!
多传感器标定的工具箱有哪些?
多传感器标定概述(Lidar/Radar/Camera/IMU/鱼眼相机)
量产基石!MapTR:在线高精地图经典开山之作
Nuscenes、KITTI等多个BEV开源数据集介绍!
嫌贵?我有一计救宝骏云海