V
主页
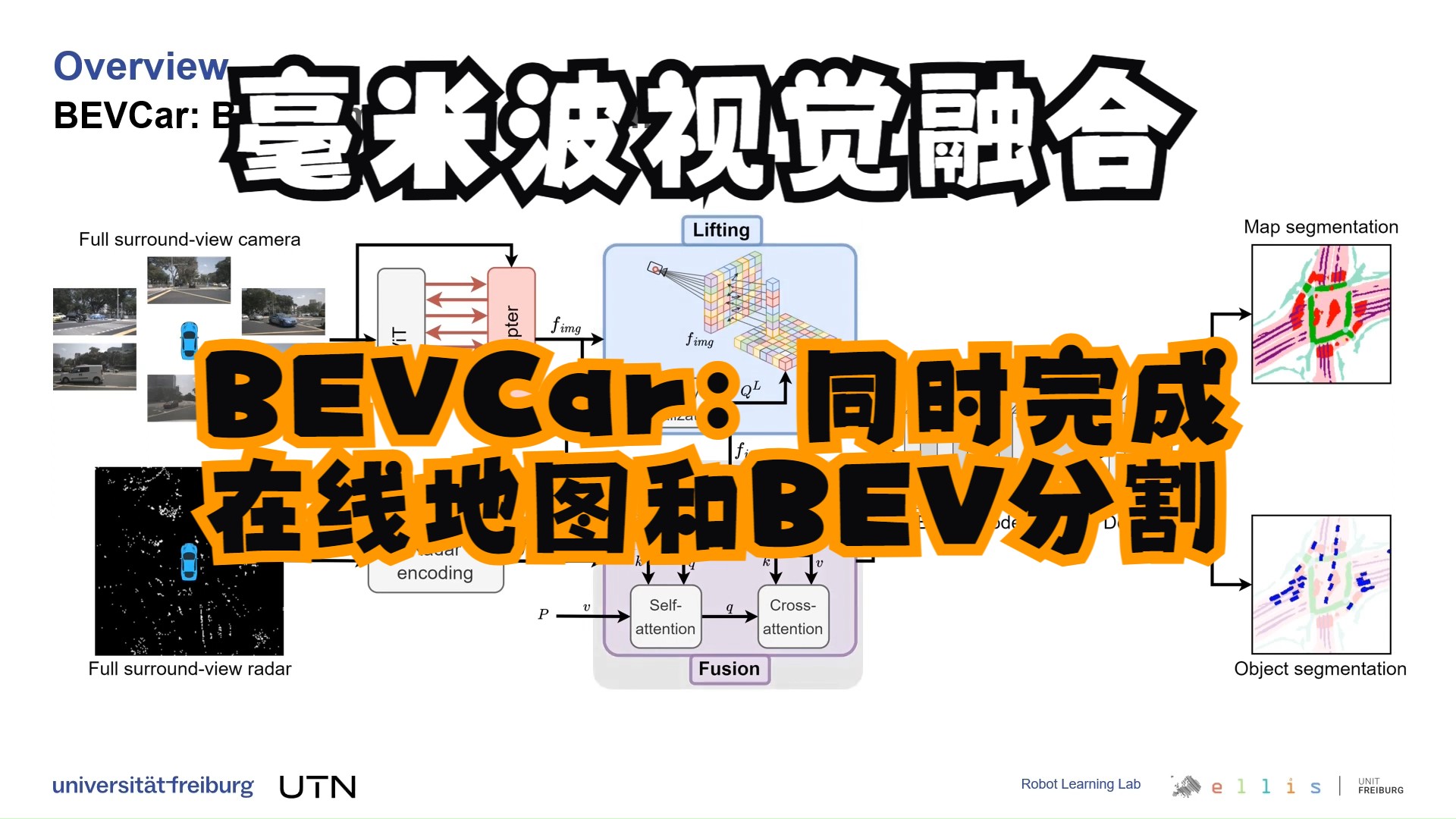
BEVCar:SOTA!RV融合完成地图和分割双任务
发布人
从鸟瞰图(BEV)的角度进行语义场景分割在促进移动机器人的规划和决策方面发挥着至关重要的作用。尽管最近的纯视觉方法在性能上取得了显著进步,但它们经常在不利的照明下、下雨或夜间等条件挣扎。虽然有源传感器为这一挑战提供了解决方案,但激光雷达高昂的成本仍然是一个限制因素。将摄像头数据与汽车雷达融合是一种更廉价的替代方案,但在之前的研究中受到的关注较少。BEVCar推进了这一有前景的途径,一种用于BEV目标和地图联合分割的新方法。 论文链接:https://arxiv.org/pdf/2403.11761.pdf 项目链接:http://bevcar.cs.uni-freiburg.de/
打开封面
下载高清视频
观看高清视频
视频下载器
【地平线×自动驾驶之心】在线高精矢量化地图构建SOTA方案MapTR v1/v2、LaneGAP
美团 | FocusBEV:自标定与时间融合策略提升单目BEV分割性能
太详细了!多传感器融合的策略和方法
最新!如何使用深度强化学习在未知环境中进行导航?
Segment Any Point Cloud:运用视觉基础模型分割一切点云
特斯拉的World Model是什么?怎么做端到端训练?
2022最新!基于激光雷达的3D目标检测综述(超全数据集和SOTA方法汇总)
Waabi最新!UnO:用于感知和预测的SOTA模型(超越监督方式)
【地平线×自动驾驶之心】ICCV 2023最新中稿的端到端自动驾驶框架—VAD!
港科技最新SLAM数据集!SLABIM:香港科技大学主楼SLAM-BIM耦合数据集
牛津大学最新!室内室外SOTA | 用于视觉重定位的地图相对姿态回归(CVPR'24 HighLight)
毫米波雷达-视觉融合感知方法(前融合/特征级融合/数据级融合)
地平线最新SOTA!Sparse4D:迈向长时序稀疏化3D目标检测的新实践
NeurIPS'24 | DHD: 多无人机协同感知框架,提升 目标轨迹预测的准确性和全面性
特斯拉的4D自动标注详解!为什么无标注数据work?
【IROS 2022】超大规模环视鱼眼数据集!SynWoodScape:8万张图像,十多个任务标注(检测/分割/深度/光流/事件等)
BEV-SAN:通过切片注意力网络实现精确的BEV 3D检测
浙江大学最新 | BEVPlace++:激光雷达全局定位方法,超越当前SOTA!泛化性能极佳
自动驾驶规划控制的未来是什么?
CVPR2022 | MeMOT:具有记忆的多目标跟踪
端到端自动驾驶:SparseDrive 算法详解
EM Planner is all u need?
落地之殇 | 联合预测是端到端正确的道路么?
2025秋招规控/轨迹预测,面试上来就问端到端联合预测。。。
太惊人了!AI已经能生成任何视频了😱
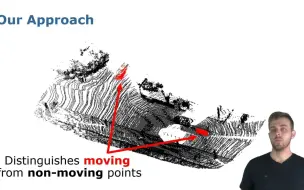
SemanticKITTI SOTA!激光雷达数据中的运动目标分割(IROS2022)
同时优化姿态和占用图!Occupancy-SLAM:基于优化的SLAM方法
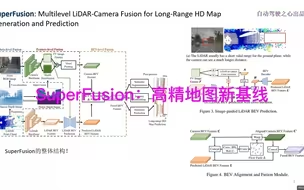
SuperFusion:高精地图新基线
最新,语义分割三十年!基础与前沿进展!
毫米波雷达视觉到底是怎么融合的?CenterFusion你搞懂了吗?
Segment Anything之后,分割的路在何方?
【ICCV 2023】HAMLET:实时语义分割域自适应方法
激光雷达3D目标检测算法有哪些?怎么分类的?
高精地图制作关键技术及领域主流方案分享-part1
CVPR2024最新BEV-Planner:Ego Status对于开环端到端自动驾驶的影响有哪些?
PLUTO算法详解:端到端首次超越基于规则的方法
BEVFusion:一个简单而鲁棒的Lidar-Camera融合框架
自动驾驶中的多传感器融合都有哪些方法?基本流程都是什么?
自动驾驶中的多传感器融合有什么优势?如何快速入门到进阶?
英伟达最新!SCube:仅用三张图,就能实现即时大规模三维场景重建