V
主页
多传感器标定的工具箱有哪些?
发布人
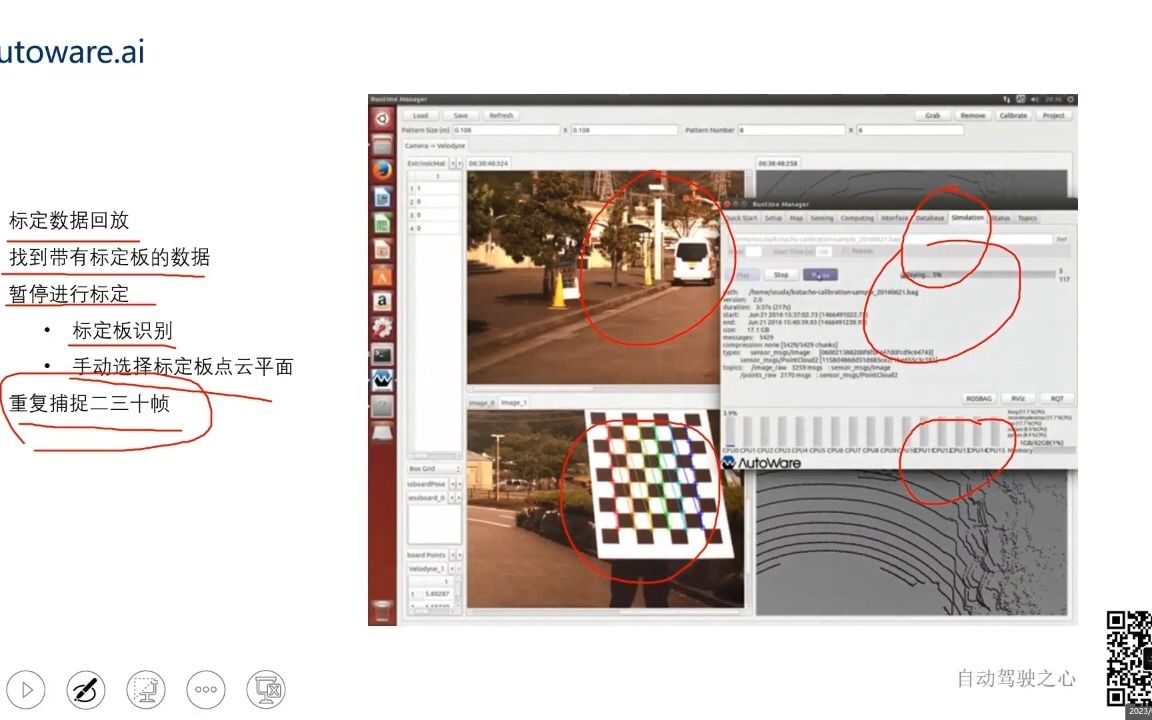
国内首个多传感器标定系统教程,针对相机内参标定、标定精度优化、传感器到车体标定、Lidar/Radar/IMU/Camera多传感器之间离线标定/在线标定、鱼眼与环视相机标定等20+标定方案展开了详细算法讲解与代码实现,适合感知、标定等算法工程人员从0到1的学习!学习链接:https://gsf.xet.tech/s/dpYnP,小助理微信AIDriver004
打开封面
下载高清视频
观看高清视频
视频下载器
实战超详细!Radar、Lidar和前置Camera的标定
【CVPR 2024】SIN-SLAM:基于神经隐式表征的稠密语义SLAM
【IROS 2022】多模态SLAM框架MIMOSA:一种针对传感器退化的弹性自治多模态SLAM框架
IROS2022 | 毫米波雷达和相机融合在高分辨率和远距离深度成像中的探索
大火的BEVFusion算法详解
自动驾驶中的多传感器融合有什么优势?如何快速入门到进阶?
毫米波雷达视觉算法CRAFT,这次彻底理解了!
支持在线时空标定!高效多传感器辅助惯性导航系统(ICRA2021)
讲明白了!端到端算法评估指标详解
ICCV 2023 | SparseFusion:基于稀疏表征融合的多模态3D新方案!
高精地图制作关键技术及领域主流方案分享-part1
分类突破!自动驾驶中的Occupancy感知方法分类
相机标定任务概述 | 哥伦比亚大学相机模型与标定系列课程(1)
自动驾驶入门技术全栈实战解析-1-感知篇
自动驾驶多传感器数据融合(2):IMU和GPS的融合定位
多模态3D检测相关2D和3D感知基础知识
All in 算法并不是最佳职业发展道路?软件基础架构也是必须了解的!
使用概率深度补全的3D激光雷达重建(IROS2022)
R3LIVE++:一个实时鲁棒的紧耦合激光雷达-惯性-视觉融合框架
端到端基础!绕不开的感知模块
自动驾驶规控工程师必备技能点!Coupling Trajectory Planning是个啥?
上交&诺亚最新 | 大幅提升!OccGen:面向自动驾驶的生成式多模态3D占用预测
港科技最新SLAM数据集!SLABIM:香港科技大学主楼SLAM-BIM耦合数据集
最新多传感器融合数据集!Hilti SLAM Challenge Dataset(RAL-IROS 2022)
麻省理工开源!LidarDM: 生成逼真、合理连贯的激光雷达点云数据
比啃书高效多了!清华高翔博士亲授【视觉SLAM十四讲】视频教程全集,一起来体验醍醐灌顶的感觉!
打 倒 一 切 反 贼 ! 第一集
LIO-Fusion:通过与GNSS/重新定位和车轮里程计的有效融合增强LIO
无人机搭载livox avia采集点云数据,rosbag记录数据,FAST-LIO建图
自动驾驶规划控制的未来是什么?
牛津大学IROS2023最新!激光雷达相机外参标定新算法(大幅降低误差)
毫米波雷达视觉到底是怎么融合的?CenterFusion你搞懂了吗?
500公里超大型SLAM数据集!多视觉异步SLAM系统(ICRA 2021)
自动驾驶假数据效果逆天了!Panacea:如何生成全景可控BEV感知数据?
CVPR 2023 | BEVHeight:基于视觉的道路3D目标检测的鲁棒框架
【CVPR 2024 】ViDAR视觉点云预测赋能大规模端到端自动驾驶
ICRA 2024 | PeLiCal:机器人无目标外参标定新方案!鲁棒性拉满了~
实时3D激光SLAM | 基于广义ICP和位姿图优化的实时无里程计方案(超赞!)
自动驾驶的规划控制究竟在做什么?我们为什么需要规划控制
KTH最新SOTA!大规模回环闭合 | 基于NeRF的稠密SLAM