V
主页
京东 11.11 红包
Meta开源「分割一切」2.0模型,视频也能分割了!
发布人
Meta开源「分割一切」2.0模型,视频也能分割了。时隔一年多,Meta 在 SIGGRAPH 上重磅宣布 Segment Anything Model 2 (SAM 2) 来了。在其前身的基础上,SAM 2 的诞生代表了领域内的一次重大进步:为静态图像和动态视频内容提供实时、可提示的对象分割,将图像和视频分割功能统一到一个强大的系统中。 目前,Meta 已经提供了一个 Web 的演示体验地址:https://sam2.metademolab.com/demo
打开封面
下载高清视频
观看高清视频
视频下载器
Segment Any Point Cloud:运用视觉基础模型分割一切点云
英伟达最新 | OmniDrive:用于3D感知、推理和规划功能的自动驾驶大语言模型
最新,语义分割三十年!基础与前沿进展!
【ICCV 2023】HAMLET:实时语义分割域自适应方法
Segment Anything之后,分割的路在何方?
OmniDet:环视鱼眼多任务感知网络(深度估计、视觉里程计、语义和运动分割、目标检测和镜头污染检测)
CVPR2023:Wamyo挑战赛分享(轨迹预测/分割/姿态估计/运动预测)
CVPR2022 | SHIFT:当前自动驾驶最大的多任务合成数据集(雾天/雨天/雪天,检测、分割、深度图、实例分割、光流)
端到端基础!绕不开的感知模块
大火的BEVFusion算法详解
端到端算法有哪些优势?完爆传统感知规控?
从0到1!彻底搞懂BEVFormer算法原理
小白两个月快速入门图像分割方向的详细学习路线图!!!-深度学习/神经网络/计算机视觉
YOLOv8v10v11创新涨点改进 | 高效涨点MSCA多尺度交叉轴注意力,适用于医学图像分割,实例分割,语义分割,目标检测等所有CV任务通用涨点即插即用模块
西安交大提出无需训练的开放词汇遥感语义分割方法(今日Arxiv 10月3日)2024年10月3日Arxiv cs.CV发文量约105余篇,减论Agent
性能提升近40%!ViPlanner:室内外局部导航全搞定(ICRA 2024)
CVPR2024 | 逆天了!一统所有目标感知任务,目标感知基础模型GLEE
毫米波雷达量产实战!Radar是如何获取点云的?
数据为王!车道线数据高效生成策略有哪些?
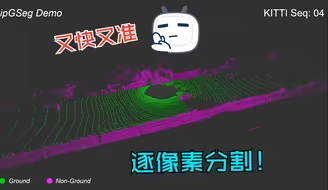
又快又准!一种基于图像表示的快速精确的LiDAR地面分割算法
闭环驾驶SOTA!CarLLaVA: CARLA自动驾驶挑战赛2.0第一名方案!
清华大学&英伟达 | DriveEnv-NeRF:基于NeRF实现高逼真自动驾驶场景,离线测试!
多传感器标定的工具箱有哪些?
讲明白了!端到端算法评估指标详解
毫米波雷达视觉算法CRAFT,这次彻底理解了!
ECCV2024 | 训练45秒,渲染300+FPS!MVSGaussian:高效且可泛化的混合高斯渲染方法
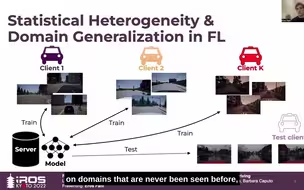
【IROS2022】联合学习结合语义分割!啪!泛化性这不就来了么~
拯救你的CUDA!什么是bank,为什么会发生bank conflict???
太详细了!多传感器融合的策略和方法
港科大最新!Vista:高保真度、通用可控性的自动驾驶世界模型
【CVPR 2024】刷爆榜单!SAFDNet:纯稀疏点云检测问鼎Waymo
上海AI Lab最新!Depth any Video:提升深度估计的一致性以及合成更多真实带有标注的数据
ICCV 2023 | 实现实时六自由度物体跟踪,深度主动轮廓模型DeepAC来了
2022最新 | HybridNets:端到端感知网络(检测+可行使区域分割+车道线三大任务)
轨迹规划新方案!基于差分平坦度的自动驾驶车辆轨迹规划
看到了这个视频,彻底搞懂了PETR算法!
CVPR2022 oral | 弱监督Lidar点云分割SOTA!8% 标注数据下达到 95.7% 的全监督性能!
斯坦福大学最新!Helpful DoggyBot:四足机器人在开放世界中取回任意物体
大幅超越SuperGlue!ICCV2023最新端到端特征匹配方法
MetaBEV:解决BEV检测和地图分割的传感器故障新方案