V
主页
京东 11.11 红包
基于任务驱动的机器人抓取工作梳理与分享(ICRA2022)
发布人
基于任务驱动的机器人抓取工作梳理与分享 主题大纲 - 机器人抓取基础知识 - 任务相关抓取的动机 - 机器人抓取以及任务相关抓取的方法 - 现有方法讲解与开源代码介绍 主讲介绍: 温伯文, 美国罗格斯大学计算机专业博士、兼谷歌X实习生, 研究方向为6D物体姿态估计跟踪、机器人抓取和操纵。 曾在Facebook Reality Labs, 亚马逊, 商汤实习。在RSS、ICRA、IROS等发表过6篇一作论文。
打开封面
下载高清视频
观看高清视频
视频下载器
机械臂抓取-开发环境搭建
[ICRA2022]谷歌机器人子公司Intrinsic最新开源机器人抓取论文
CVPR'24开源|NeRF-SLAM新SOTA:请任意选择你的高效神经
四旋翼无人机-ADRC整体介绍
无需真实机械臂也可以训练具身大模型!通过Robostudio的R2S2R工具链来采集训练和部署机器人策略
Occupancy的工程细节
机械臂抓取简介
ICRA2022:自适应环境的移动机器人自主导航
从零搭建一套结构光3D重建系统 [理论+源码+实践]
四元数基础
3DGS进化,高效高质量的GaussianPro来袭!
五分钟开发一款自己的点云处理软件(python)
香港大学&南科大!通过基于模型的学习实现直接基于点的端到端机器人导航
ECCV'24开源 完虐COLMAP!百倍加速!ACEZero:全新SfM革新三维重建!
点云3D深度学习模型与实践
Open3D与点云处理简介(公开课)
四旋翼模型与控制基础
MIT重磅开源!别再用COLMAP了!FlowMap给你最精确的SfM!
极快跟踪一切!DOT:无惧遮挡!
最新ICRA2021论文,EGO-Swarm:在杂乱环境中的全自动分散式四旋翼群系统
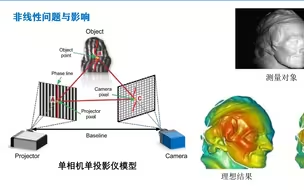
结构光的非线性问题与校正
港大开源 | DreamWaltz-G: 输入文本即可生成全身动作及表情可驱动的3D数字人!
吊打ORB3!73Hz!南洋理工重磅开源AirSLAM:无惧复杂光照的超强点线视觉SLAM!
无人机|PID算法详解与实战(上)
深度相机概述
Transcrib3D:基于大语言模型三维指称表达理解SOTA
无需 GPS:语义地图引领多机器人室内外探索
SCIROBOT2023 港大开源一种用于自主导航的具有扩展传感器视场的自旋转单驱动无人机!
CVPR'24开源 | 吊打一切VINS!又快又好的视觉惯性导航系统!
激光-视觉-IMU-GPS融合SLAM系列课程-传感器介绍与代表性SLAM解析
太稳啦!Gaussian Splatting杀入6D物体位姿估计!
相机标定的基本原理与经验分享
【3D视觉工坊】第十三公开课:基于格雷码结合相移技术的高鲁棒性高效率动态三维面形测量
IEEE'24 | 缩短1倍!南开最新基于动态拓扑图的多无人机探索框架!
NeurIPS'24三维网格生成新模式!自回归大语言模型也能生成三维网格?
CVPR满分论文!即插即用的6D物体姿态估计大模型(BOP排行榜第一)
亲测50帧!无需内参!超越Dust3r!Spann3r:无需优化对齐快速进行3D重建!
03 自动驾驶中多传感器同步理论(Camera + LiDAR + Radar + IMU)(上篇)
ICRA2021,这台无人机不怕撞机!狭小环境下无人机弹性碰撞自主导航!
重磅开源!连你的微表情都可以轻松还原!SMIRK超强3D面部重建技术!