V
主页
点云深度学习-基于POINT的深度学习网络
发布人
学习地址:https://app0S6nfQRG6303.h5.xiaoeknow.com 一个专注3D视觉领域课程分享的平台!依托公众号3D视觉工坊与计算机视觉工坊。 课程主要包括:自动驾驶、SLAM、三维点云、三维重建、机械臂抓取与位姿估计、结构光等。
打开封面
下载高清视频
观看高清视频
视频下载器
点云3D深度学习模型与实践
Open3D与点云处理简介(公开课)
三维点云系列视频——第一章绪论
五分钟开发一款自己的点云处理软件(python)
四旋翼模型与控制基础
深度相机概述
四旋翼无人机-PX4控制算法代码
四旋翼无人机-PX4控制算法原理
四元数基础
相机标定的基本原理与经验分享
如何高效学习单目深度估计?
ORB-SLAM3系列之特征匹配(三 MLPnP,词袋模型)
当MVS遇上Gaussian MVSGaussian 快速、可泛化的高斯重建框架!-上篇
单目深度估计绪论
BEV与Occupancy网络的全景解析与实战
四旋翼无人机-ADRC整体介绍
Occupancy的工程细节
PID控制器原理讲解
当3DGS遇上可泛化物体位姿估计
光学3D测量技术原理及应用
BEV&Occ提升颗粒度的方案
基于面结构光的高反射物体重建方法关键技术分享[相位偏折术]
单目深度估计|连续帧方法实战课
大作业|激光-视觉-IMU-GPS融合SLAM算法
Open3D-三维数据结构
CVPR2023|基于深度学习MVS的最新进展 GeoMVSNet
绪论(LOAM系列与LIO-SAM简介)
(公开课)视觉SLAM原理与ORB-SLAM3系列算法
高速结构光三维面形测量方法
Splatam:用于稠密RGB-D SLAM的3D高斯的溅射、跟踪和建图
如何轻松拿捏LIO-SAM-数学基础篇
中科院最新CityGaussian:VRAR时代的城市重建新标杆-上篇
SIGGRAPH'2024|RTG-SLAM:基于3DGS的大尺度场景实时三维重建-上篇
LVI-SAM代码实战与评估
互补滤波姿态估计、卡尔曼滤波姿态、高度估计
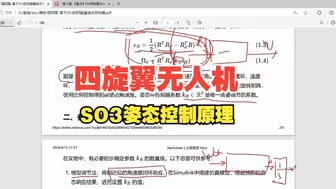
四旋翼无人机-SO3姿态控制原理
传统深度估计方法实战
国内首个面向具身智能方向的理论与实战系统课程
【3D视觉工坊】第八期公开课:立体视觉之立体匹配理论与实战
NASA JPL团队CoSTAR一大力作:直接激光雷达里程计利用密集点云快速定位