V
主页
多模态响应与功能集成,华中科技大学微型磁控胶囊机器人登上《Nature Communications》
发布人
受制于有限的胶囊空间结构和复杂的胃肠道环境,在小型化和功能化应用需求下,磁控胶囊机器人本体结构设计及外部磁驱动策略开发等均面临巨大挑战。来自华中科技大学国家脉冲强磁场科学中心与电气与电子工程学院的李亮教授、曹全梁教授团队,提出一种新颖的微型磁控胶囊机器人MagCap,通过创新胶囊机器人内部磁化结构与外部驱动策略,赋予了胶囊机器人主动靶向运输、定点采样、多重药物释放和磁电/热转化激励等功能,为胃肠道疾病无创诊疗提供了全新的解决方案。#微型机器人#人工智能#磁控#多模态响应
打开封面
下载高清视频
观看高清视频
视频下载器
微型机器人轴承替代品
重磅出炉!高翔《自动驾驶与机器人中的SLAM技术》新书配套课程发布
清华最新开源 | 3DGS对多任务机器人操作下手,可让机器人代理通过准确的动作预测完成人类指令
Science Robotics 香港城市大学与香港科技大学开发了具有协同混合运动的敏捷单足跳跃四轴飞行器
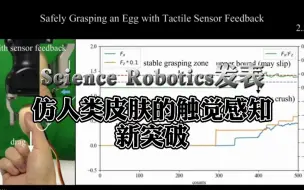
突破!《Science Robotics》:机器人触觉传感器的自解耦和超分辨率
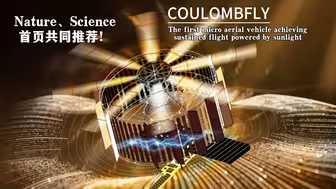
《Nature》刊发北航重磅成果!Nature、Science首页共同推荐!北航 | CoulombFly:超轻微型飞行器的太阳能持续飞行
ECCV'24 威斯康星大学麦迪逊分校 英伟达 | Dolphins:多模态学习提升自动驾驶像人类一样理解响应各种场景
我国科研团队成功破解多旋翼无人机飞行失控难题,利用"被动容灾控制算法"保持安全飞行并实现可控返航
看完他九家公司所做的事,你会发现他公司几乎做的都是具有挑战性的先河产业
跨域无人军团出征 清华 | LVCP 无需精确先验,基于密切集成 的协同实时相对定位
Science Robotics | 从液体表面张力获得灵感,研发出”能屈能伸”的可变刚度车轮
Digit人形机器人正式对外销售!标价25万美元!
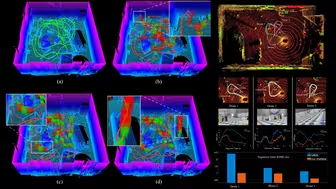
中国科大新作 | 基于3D高斯的多模态融合在无界场景中的定位和重建
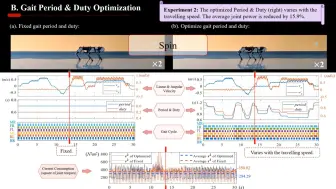
上海交通大学高峰教授团队:六足机器人步态优化框架,让足式机器人像哺乳动物一样行走
第十一期智能无人机线下实训精彩回顾
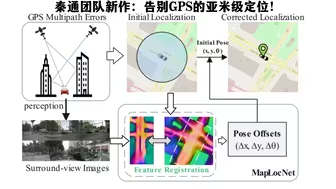
IROS24新作 | 上交大秦通团队,MapLocNet:实现自动驾驶新突破 告别GPS的亚米级定位!
IROS'24 普渡大学、麻省理工学院 | 5自由度触觉夹持器,性能匹敌仿生手,实现高效精确操控
UCSD、MIT华人团队开源Open-TeleVision:沉浸式体验跨越3000里的机器人远程操作。
Science Robotics封面 | 当机器人学会用'快照'导航, 轻重量小内存实现'长途跋涉'
移动机器人运动规划
浙江大学邹俊/唐威 Science子刊封面:仿生:利用仿生学设计的自适应软体一体化夹持器实现强大的无人机操作能力
世界最大可操控人形机器人!八米!
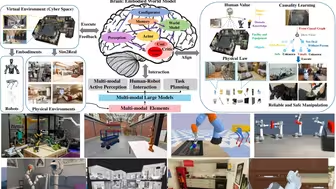
鹏城实验室、中山大学 | 深度调研解析将近400篇文献,首篇多模态大模型时代的具身智能【综述】重磅推出
波士顿动力官网最新发布机器狗舞蹈
上海交大邹丹平团队的最新开源力作,Ground-Fusion:一种对极端情况具有鲁棒性的低成本地面 SLAM 系统。
DeepMind训练AI踢足球,技术精湛堪比真人
ECCV'2024 北航、极氪领衔 | FSD-BEV:大幅度提升基于视觉的3D目标检测算法性能,实现感知新SOTA!
ICRA 2024 最佳学生论文奖 | NoMaD:基于Transformer用于 导航和探索的目标掩蔽扩散策略
机器人顶级期刊T R O创刊至今首篇全华班Best paper诞生。一种利用分布式无人机机队进行快速协作探索的方法RACER获得Best paper。
第四次工业革命已悄然兴起,那么它的标志性产业会是什么呢?
果蝇无人机?用翅膀飞起来的无人机来了!
国内智驾老兵百度开源BEVWorld:通过统一BEV潜在空间实现自动驾驶的多模态世界模型
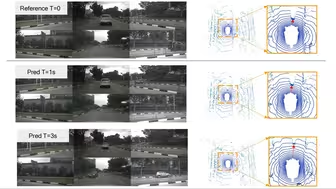
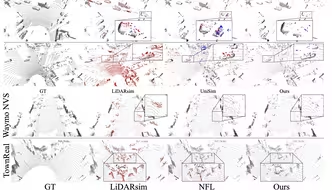
CVPR'24 Highlight 开源,DyNFL:使用NeRF对动态激光雷达场景仿真
移动机器人运动规划方法分类
天鹅巨型游艇出炉!
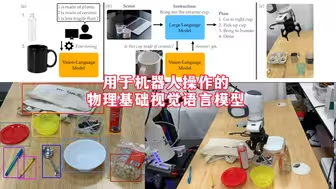
3.96万条众包和41.7万条自动化 的物理概念标注,助力VLMs突破 让机器人像人类一样理解物理世界
NeRF在机器人技术中 应用的最新综述,旨在为 该领域提供重要参考指南
IROS 2020【最佳论文奖】机器人也能“甩笔”,拥有触觉分析能力
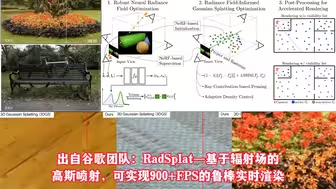
出自谷歌团队,RadSplat: 基于辐射场的高斯喷射,可实现 900+ FPS 的鲁棒实时渲染
10大与人工智能相关的<顶级会议>,哪些是你的投递首选?这些顶会论文与SCI论文相比如何呢?