V
主页
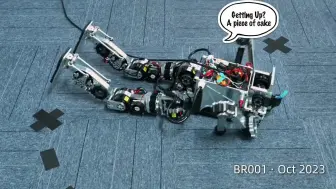
机器人践踏草坪的视频证据
发布人
还是强化学习做的步态,上一个视频里面同一个策略走到山底下,大家决定让它上个草地看看。 感觉草地本身不难,比较难顶的是自己走上那个路肩,以及怕把路边崭新的一个model 3给刮花了。 最后决定过马路走一下对面30°的坡,机器人是上去了,但拍摄的同学比较脚滑,于是视频戛然而止。 走下山:BV1XZ421U7Wo 论文:https://ieeexplore.ieee.org/document/10375167/
打开封面
下载高清视频
观看高清视频
视频下载器
机器人进化先从RoboCup足球杯开始
解救机器人并帮助它逃离关押地(迫真)
机器人终于学会了走路,护送它自己走下山
世界最强AI驱动机器人 Figure 02 发布🤖
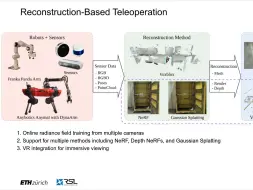
ETH | Anymal 机器人远程操作的辐射场
Isaaclab强化学习训练仿真:未来的丧尸电影还需要群演吗?
动作捕捉+3D打印,打造遥操作机器人
【开源】宇树人形机器人第一视角遥操作方案
Berkeley Humanoid 伯克利人形机器人
(RSS'24) HOV-SG:基于语言的机器人导航的分层开放词汇 3D 场景图
双足机器人强化学习humanoid-gym sim2sim详细学习过程,Openloong的urdf为例
UMI on Legs: Making Manipulation Policies Mobile with Manipulation-Centric WBC
DeeperMimic:(基于实时动画的)四足机器人多技能控制
基于IsaacLab的人形机器人强化学习
人形机器人应用-柔性物体操作
WAIC 乐聚人型机器人 世界人工智能大会
双足机器人强化学习新算法测试,支持自动切换行走与站立步态
变刚度人形机器人腿部关节设计 纤维堵塞结构被动柔顺变阻尼
成精了!逆天了我的人形机器人!这样搞也行!
就在刚刚,open ai直接甩出Figure 02,强到离谱,这仅仅只是开始,再迭代10年呢?我们这代人的养老真的要靠机器人了
双足机器人isaacgym训练后sim2sim到mujoco扭成麻花了
两个机器人服务你有多爽?
BD Altas 感知功能 你能从中看到哪些可以学习的技术点?
傅利叶GR-1 sim2sim到Mujoco环境中
优必选机器人入职极氪!人形机器人进厂打工这就来了?
IROS复现:基于DDPG的机械臂抓取训练(sim2real)
四足,轮腿,人形开源项目
【UniX AI】推出世界首款量产消费级全尺寸通用移动仿人机器人——Wanda。
人形机器人应用-执行完整task
人形机器人强化学习训练方法,为什么腿是直着的?humanoid gym
95后创办钛虎机器人,完成数千万元Pre-A轮融资,推出人形机器人
机器人:这一大飞脚 好悬没给我电机踹开线喽
【镜像开源】pinocchio、crocoddyl 可视化工具,镜像里已经安装好了,链接见简介
人形机器人,强化学习sim 2 sim,humanoid gym 训练方法
全网最专业Figure 02视频讲解
强化学习导航:仿真环境训练及ROS实车部署
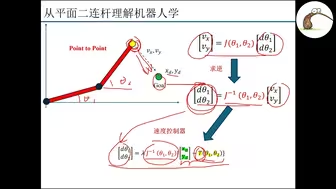
【具身抓取课程-1】机器人基础
机器人蹒跚学步,它和小孩哪个走得好
青龙人形机器人-如何打造智慧的大脑
Nvidia推出新的人工智能工具,加速人形机器人的开发进程