V
主页
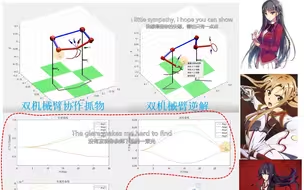
主从机械臂||双机械臂跟随控制
发布人
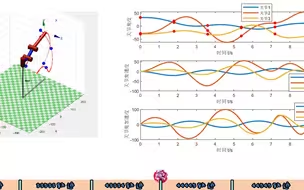
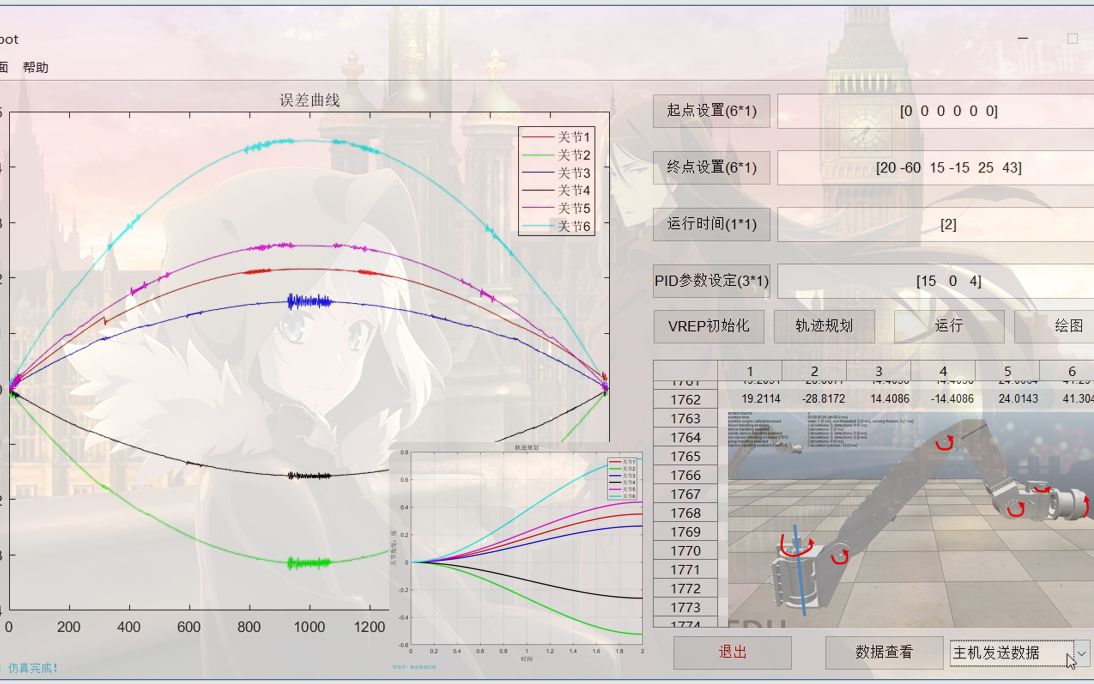
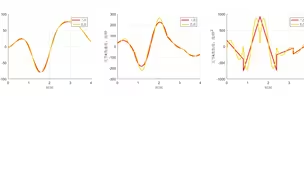
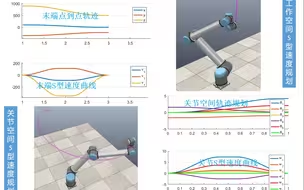
利用matlab和vrep仿真工具,设计算法完成从机器人对主机器人运动的跟踪,主要工作如下: 1.设置各关节起点终点,采用三次多项式进行机器人轨迹规划; 2.主机器人根据规划的轨迹进行运动; 3.从机器人接收主机器人发送的实时关节角度数据; 4.从机器人采用PID控制算法跟踪主机器人进行运动; 5.设计GUI人机交互界面,完成轨迹规划、数据采集、图片显示、matlab与vrep连接通信、数据展示等功能。
打开封面
下载高清视频
观看高清视频
视频下载器
六自由度机械臂动力学轨迹跟踪控制
机械臂阻抗力跟踪、阻抗MBK参数对力跟踪效果影响
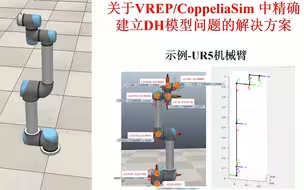
关于VREP/CoppeliaSim 中精确建立DH模型问题的解决方案 - ur5机器人视频教程
六自由度机械臂雅可比矩阵的实验验证
五次&三次多项式连续轨迹规划
五次非均匀B样条S型轨迹规划
UR机器人S型轨迹规划matlab、vrep联合仿真
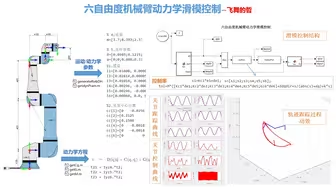
六自由度机械臂动力学滑模控制
催眠女高中生
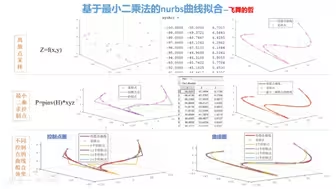
基于最小二乘的nurbs曲线拟合
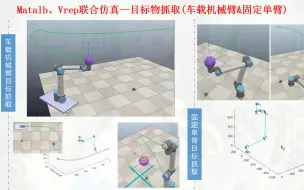
六自由度机械臂目标物抓取-车载&单臂matalb、vrep联合仿真
机器人多项式拼接轨迹规划的各类形式建模仿真——33333、33533、43334、44445、44545拼接轨迹
捆绑play
小车(移动机器人)仿真平台
基于粒子群/遗传算法的取件机械手轨迹综合优化设计
分解控制
NUBUS五次非均匀B样条轨迹规划及机械臂仿真
“怀念搞车的日子”
小段曲线速度、姿态连续轨迹规划及运动仿真
机械臂轨迹规划matlab、Vrep联合仿真
机械臂姿态平滑规划
美女被木乃伊催眠洗脑控制,变得乖巧听话
车载六自由度机械臂仿真
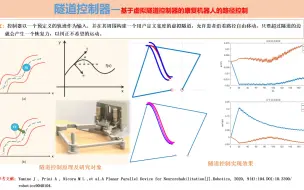
隧道控制器基于虚拟隧道控制器的康复机器人的路径控制
Submarine Robot潜艇机器人水下机械臂ROV三维图纸
小老哥灵魂出窍附身别人妻子身体,附身性转tsf短片
基于粒子群的六自由度机械臂能量最优轨迹规划
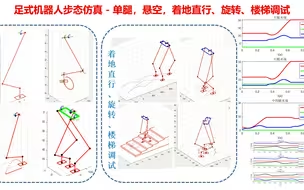
足式机器人步态仿真、单腿、悬空、着地直行、旋转、爬楼梯联合调试
保姆级手把手IsaacLab安装教程
六自由度机械臂逆解仿真
双臂机器人仿真
机械臂组装
具身智能机械臂实操入门课程-04(完):模型推理和抓取效果验证
基于零空间的任务级优先控制wbc、ROS、matlab
11月份专属「静止2」
电源线焊接
六自由度动力学RBF自适应阻抗恒力控制
4驱4转全向移动机器人运动控制
基于倒立摆模型的双足机器人爬楼梯运动控制
机器人阻抗控制— 动力学建模、试探抓取目标物、控制周期影响展示