V
主页
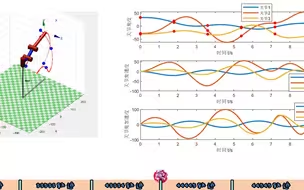
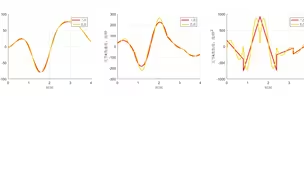
车载六自由度机械臂仿真
发布人
1.实现车载六自由度机械臂的运动仿真; 2.主要包含车重心轨迹规划,机械臂运动规划,机械臂运动学解算等; 3.车子可实现任意姿态旋转,搭载的机械臂可协助机器人完成特定工作任务。
打开封面
下载高清视频
观看高清视频
视频下载器
小车(移动机器人)仿真平台
机器人多项式拼接轨迹规划的各类形式建模仿真——33333、33533、43334、44445、44545拼接轨迹
无人机与小车的协同轨迹跟踪控制
五次&三次多项式连续轨迹规划
机器人示教仿真
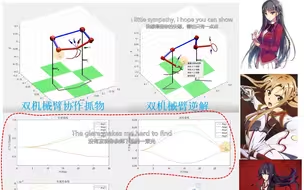
主从机械臂||双机械臂跟随控制
基于贝塞尔曲线的六足机器人步态规划
人形机器人控制仿真
人工势场动态避障,二维APF
双臂机器人仿真
多差速驱动全方位轮式移动机器人仿真
粒子群轨迹规划
机械臂阻抗力跟踪、阻抗MBK参数对力跟踪效果影响
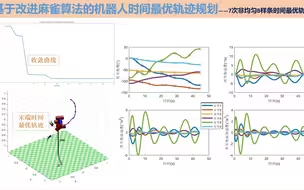
基于改进麻雀算法的机器人时间最优轨迹规划——7次非均匀B样条轨迹
机器人阻抗控制— 动力学建模、试探抓取目标物、控制周期影响展示
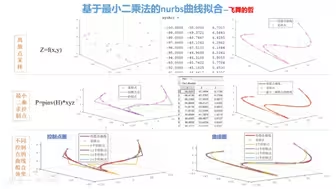
基于最小二乘的nurbs曲线拟合
机械臂碰撞检测双臂检测单臂与障碍物检测
机械臂姿态平滑规划
NURBS曲线型值点反求控制点、导数求解、轨迹曲线拟合
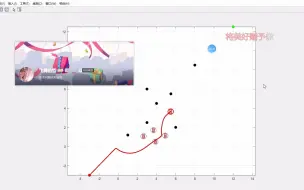
改进RRT路径规划与轨迹规划
样条曲线轨迹规划
微型六轴机械臂测试
机器人连续位姿同步插值轨迹规划——对数四元数、b样条曲线、c2连续位姿同步规划
基于伪谱法的航天器姿态路径优化
四轴机械臂标准模型控制器
编队集群控制
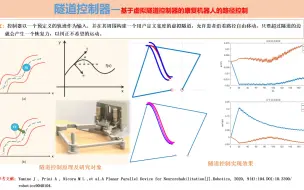
隧道控制器基于虚拟隧道控制器的康复机器人的路径控制
25工训赛物流小车 机械臂方案就这样吧,不调了
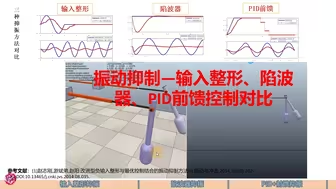
振动抑制—输入整形、陷波器、PID前馈控制对比
【25工训】【物流小车】【电机控制】太强了!这车太无敌辣!!!
《关于大一新生做的抓取物体机械臂这档事》
NURBS曲面拟合、平滑、网格控制点反算、法面误差计算一网打尽
姿态控制
谐波减速机械臂写字机
小球与椭圆碰撞模拟 matlab
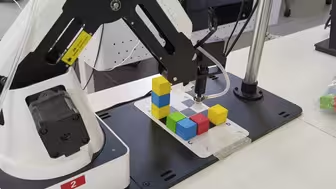
机械臂码垛实验[金工实习]
还是齿轮减速靠谱,机械臂写3毫米汉字
3D打印机械臂
diy机械臂
机械臂动作状态机演示