V
主页
3D视觉应用-现代智慧农业
发布人
https://www.youtube.com/watch?v=NO8PmqEI0cc 这样的场景见过吗?农场里全部都是机器人!机器人正有条不紊地进行耕作!来自悉尼大学的智慧农业解决方案,主要用来解决澳大利亚农业劳动力老龄化问题!
打开封面
下载高清视频
观看高清视频
视频下载器
光学3D测量技术原理及应用
激光-视觉-IMU-GPS融合SLAM系列课程-传感器介绍与代表性SLAM解析
极快跟踪一切!DOT:无惧遮挡!
神奇!树脂+玻璃+手机就能制作3D全息投影?
CVPR2021,基于多视点鱼眼图像的实时球面扫描立体成像
SLAM里程碑!戴森机器人实验室最新开源:3D GS杀入SLAM!
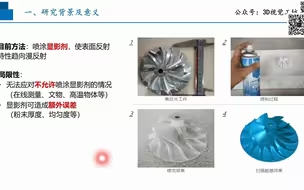
高反光表面三维视觉测量方法
LVI-SAM|视觉-惯性子系统(VIS)代码精读
四旋翼无人机-ADRC整体介绍
面向3D视觉的科研方法 | 论文投稿与流程
无需 GPS:语义地图引领多机器人室内外探索
国内首个面向具身智能方向的理论与实战系统课程
这绝对是质量最高的单目深度估计开源方案!
[IROS2021] 使用镜面反射减少机器人视觉系统中的遮挡
全新自研 Mech-Eye NANO ULTRA 工业3D相机可对细小、结构精密物体高质量成像
3D体感控制器Leap Motion,使用红外LED+灰阶camera的方式实时采集手部数据
[IROS2021] TUPPer-Map:用于 3D 语义建图的时间和统一全景感知
斯坦福团队EquiBot:仅用 5 分钟演示,机器人就能学会日常操作
Occupancy占用网络的多维应用探究
缺陷检测—3D数据基础简述
厦门大学:使用可穿戴 IMU和LiDAR的大规模室内外4D场景捕获
2.4倍加速!PRAM最新开源的视觉定位模型!解锁以地图为中心的学习!
深度相机概述
四旋翼模型简介-御风250模型
代码开源!伦敦大学学院:DSP-SLAM:物体特征级SLAM
零基础入门四旋翼建模与控制无人机 | 四元数基础
如何处理视觉SLAM长期定位中的外观变化和轨迹漂移?
【3D视觉工坊】第十四期直播 慕尼黑工业大学博士详解室内SLAM中的几何约束
四旋翼模型与控制基础
这4个常见的3D视觉类型你都知道吗?
PID控制器原理讲解
双目相机标定基础及标定实战
香港大学&南科大!通过基于模型的学习实现直接基于点的端到端机器人导航
传感器与遥控器校准原理
CVPR'24 奔驰DualAD解耦动态和静态世界实现端到端驾驶!
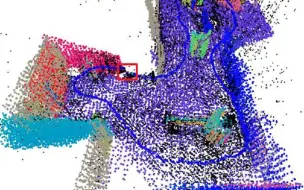
ICRA23开源 动态环境下高鲁棒的雷达MOT SLAM!
GS-SLAM:具有3D高斯溅射的稠密视觉SLAM
单目深度估计|连续帧方法实战课
Kivicube AR平台:低代码可视化编辑即可完成SLAM场景制作
戴森机器人实验室发布SuperPrimitive:三维重建&视觉里程计&深度补全轻松搞定!