V
主页
Visual CPG-RL: Learning Central Pattern Generators for Visually-Guided Quadruped
发布人
https://www.youtube.com/watch?v=wpsbSMzIwgM&t=11s Visual CPG-RL: Learning Central Pattern Generators for Visually-Guided Quadruped Locomotion Guillaume Bellegarda, Milad Shafiee, Auke Ijspeert We present a framework for learning visually-guided quadruped locomotion by integrating exteroceptive sensing and central pattern generators (CPGs), i.e. systems of coupled oscillators, into the deep reinforcement learning (DRL) framework. Through both exteroceptive and proprioceptive sensing, the agent learns to coordinate rhythmic behavior among different oscillators to track velocity commands, while at the same time override these commands to avoid collisions with the environment. We investigate several open robotics and neuroscience questions: 1) What is the role of explicit interoscillator couplings between oscillators, and can such coupling improve sim-to-real transfer for navigation robustness? 2) What are the effects of using a memory-enabled vs. a memory-free policy network with respect to robustness, energy-efficiency, and tracking performance in sim-to-real navigation tasks? 3) How do animals manage to tolerate high sensorimotor delays, yet still produce smooth and robust gaits? To answer these questions, we train our perceptive locomotion policies in simulation and perform sim-to-real transfers to the Unitree Go1 quadruped, where we observe robust navigation in a variety of scenarios. Our results show that the CPG, explicit interoscillator couplings, and memory-enabled policy representations are all beneficial for energy efficiency, robustness to noise and sensory delays of 90 ms, and tracking performance for successful sim-to-real transfer for navigation tasks. Video results can be found at this https URL. paper link: https://arxiv.org/abs/2212.14400
打开封面
下载高清视频
观看高清视频
视频下载器
How to design nonlinear MPC with deep learning prediction model
Conflict-based Model Predictive Control for Scalable Multi-Robot Motion Planning
通过优化理论指导设计双足以达到控制和任务的最优
博士论文答辩 - Alexander Schperberg - 统一基于模型的优化和机器学习
(Humanoid)An IntegratedForceSensitive, Impedance Controlled, Tendon-Driven Wrist
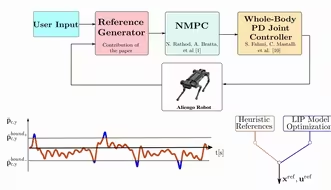
Optimization-Based Reference Generator for Nonlinear Model Predictive Control
Reinforcement Learning for Versatile, Dynamic, and Robust Bipedal Locomotion
ETH 最新RL成果,已开源!SMUG 规划器:适用于具有挑战性环境下的移动机器人的安全多目标规划器
qpSWIFT : A Real-time Sparse Quadratic Program Solver for Robotic Applications
Combining Learning-Based Locomotion with Model-Based Manipulation for Legged
(RA-L 23) Reactive Landing Controller for Quadruped Robots
The MIT Humanoid Robot Design Motion Planning and Control ForAcrobatic Behaviors
Deep Compliant Control for Legged Robots
(submit to IROS 24) A Single-Leg Robot that Mimics the Human Leg and Toe
ICRA 24 Convergent iLQR for Safe Trajectory Planning and Control of Legged Robot
Foothold Evaluation Criterion for Dynamic Transition Feasibility for Quadruped
Learning whole-body manipulation for quadrupedal robot
Centroidal Preview Control for Humanoid Multi-Contact Motion RA-L IROS 2022
Reinforcement learning for blind stair climbing with legged and wheeled robot
SCIENCE ROBOTICS: Dynamic locomotion synchronization via bilateral tele
单腿站立 轻轻松松 Atlas KarateKid
(Talk ICRA 2024) Actor-Critic Model Predictive Control
An Efficient and Versatile Framework for Multi-Contact Optimal Control
Online trajectory optimization for dynamic aerial motions of a quadruped robot
High-Power, Flexible, and Robust Musculoskeletal Hand (IROS 2017)
Learning Morphologically Adaptive Locomotion Controllerfor Quadruped
ETH 最新Science Robotics基于学习的轮腿机器人自主导航和运动
solving the walking robot problem with reinforcement learning
Sampling based path replanning
真牛!这个人形机器人吊打很多厂家的“产品”
开源+中英双语教程!ACADO写NMPC轨迹跟踪,仿真里几乎没有误差
Event Camera Visual Odometry for Dynamic Motion Tracking of a Legged Robot
RoLoMa: Robust Loco-Manipulation for Quadruped Robots with Arms
autonomous path planning over curved uneven path
Dynamic Planning, forwards, backwards, and sideways on Stairs
6-DOF Pose Estimation combining Deep Learning Object Detection
NASA’s first humanoid robot Valkyrie is being tested in Australia
用于人形机器人导航的 3D 多边形建图
MIT Robotics - Jessy Grizzle - Mathematics and Learning for Bipedal Locomotion
具有闭合/并行运动链的人形机器人的全身控制WBC:袋鼠案例研究