V
主页
Conflict-based Model Predictive Control for Scalable Multi-Robot Motion Planning
发布人
https://www.youtube.com/watch?v=IrSnzFeSkhg Conflict-Based Model Predictive Control for Scalable Multi-Robot Motion Planning Ardalan Tajbakhsh, Lorenz T. Biegler, Aaron M. Johnson This paper presents a scalable multi-robot motion planning algorithm called Conflict-Based Model Predictive Control (CB-MPC). Inspired by Conflict-Based Search (CBS), the planner leverages a similar high-level conflict tree to efficiently resolve robot-robot conflicts in the continuous space, while reasoning about each agent's kinematic and dynamic constraints and actuation limits using MPC as the low-level planner. We show that tracking high-level multi-robot plans with a vanilla MPC controller is insufficient, and results in unexpected collisions in tight navigation scenarios. Compared to other variations of multi-robot MPC like joint, prioritized, and distributed, we demonstrate that CB-MPC improves the executability and success rate, allows for closer robot-robot interactions, and reduces the computational cost significantly without compromising the solution quality across a variety of environments. Furthermore, we show that CB-MPC combined with a high-level path planner can effectively substitute computationally expensive full-horizon multi-robot kinodynamic planners. https://arxiv.org/abs/2303.01619
打开封面
下载高清视频
观看高清视频
视频下载器
TinyMPC model-predictive-control-on-resource-constrained-microcontrollers
(ICRA 24) Quadruped-Frog: Rapid Online Optimization of Continuous Quadruped Jump
通过优化理论指导设计双足以达到控制和任务的最优
How to design nonlinear MPC with deep learning prediction model
ETH 最新RL成果,已开源!SMUG 规划器:适用于具有挑战性环境下的移动机器人的安全多目标规划器
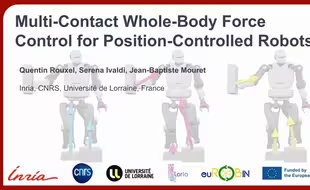
有开源github代码! RA-L论文 人形机器人的多接触全身控制
模型预测控制 (MPC) 从推导到C++ 实现,详细教程 仅使用 Eigen 库 代码在简介
Centroidal Preview Control for Humanoid Multi-Contact Motion RA-L IROS 2022
(Humanoid)An IntegratedForceSensitive, Impedance Controlled, Tendon-Driven Wrist
ICRA 24 Convergent iLQR for Safe Trajectory Planning and Control of Legged Robot
具有闭合/并行运动链的人形机器人的全身控制WBC:袋鼠案例研究
Deep Compliant Control for Legged Robots
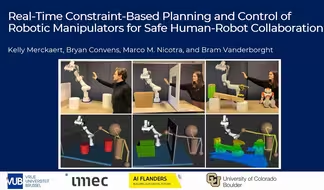
Real-Time Constraint-Based Planning and Control of Robotic Manipulators
人形机器人足底机械结构设计
ETH最新论文 重新思考鲁棒性评估: 基于学习的四足运动控制的对抗性攻击
Learning whole-body manipulation for quadrupedal robot
Combining Learning-Based Locomotion with Model-Based Manipulation for Legged
(T-RO 24)Tube Acceleration:Robust Dexterous Throwing against Release Uncertainty
EAGLE: The First Event Camera Dataset Gathered by an Agile Quadruped Robot
(Talk ICRA 2024) Actor-Critic Model Predictive Control
Bipedal Safe Navigation over Uncertain Rough Terrain
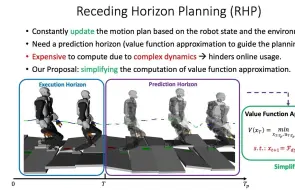
Online Multi-Contact Receding Horizon Planning via Value Function Approximation
ETH 最新Science Robotics基于学习的轮腿机器人自主导航和运动
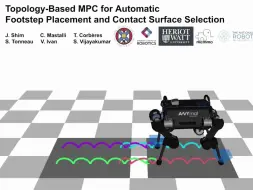
Topology-Based MPC for Automatic Footstep Placement and Contact Surface Selectio
qpSWIFT : A Real-time Sparse Quadratic Program Solver for Robotic Applications
Visual CPG-RL: Learning Central Pattern Generators for Visually-Guided Quadruped
呐, 这就叫优雅~
Reinforcement learning for blind stair climbing with legged and wheeled robot
人形机器人3d 打印手臂 网址在简介 欢迎关注三连
Sampling based path replanning
An Efficient and Versatile Framework for Multi-Contact Optimal Control
(Humanoids 22)Musculoskeletal Wheeled Robot Musashi-W for RealWorld Applications
(IROS 2023) 浮动基座机器人本体感受外部力矩学习及其在类人运动中的应用
(submit to IROS 24) A Single-Leg Robot that Mimics the Human Leg and Toe
SLoMo: A General System for Legged Robot Motion Imitation from Casual Videos
(Humanoids 2023) Learning Safer Footstep Planning Policies for Legged Robots
SCIENCE ROBOTICS: Dynamic locomotion synchronization via bilateral tele
The MIT Humanoid Robot Design Motion Planning and Control ForAcrobatic Behaviors
Dynamic Mobile Manipulation via Whole-Body Teleoperation of a Wheeled Humanoid
DeepMind x UCL RL Lecture Series - Exploration & Control 2