V
主页
毫米波雷达视觉融合教程:毫米波雷达工作原理和传感器特性
发布人
毫米波雷达视觉融合教程:毫米波雷达的工作原理和传感器特性 0. 自动驾驶之心官网正式上线了:www.zdjszx.com(海量视频教程等你来学) 1. 历时半年整理,多传感器融合系列:毫米波雷达和视觉融合感知教程正式上线了!!!传统方式&&深度学习方案,从数据处理、聚类、跟踪匹配、深度学习点云方案、2D/3D融合等多个方向展开讲解,是一门同时面向工业界和学术界的教程! 课程链接:https://gsf.xet.tech/s/NKFsd 小助理微信咨询:AIDriver004
打开封面
下载高清视频
观看高清视频
视频下载器
毫米波雷达视觉到底是怎么融合的?CenterFusion你搞懂了吗?
毫米波雷达-视觉融合感知方法(前融合/特征级融合/数据级融合)
自动驾驶中的多传感器融合状态估计如何建模?
IROS2022 | 毫米波雷达和相机融合在高分辨率和远距离深度成像中的探索
太详细了!多传感器融合的策略和方法
毫米波雷达量产实战!Radar是如何获取点云的?
自动驾驶中的多传感器融合都有哪些方法?基本流程都是什么?
R3LIVE++:一个实时鲁棒的紧耦合激光雷达-惯性-视觉融合框架
多模态3D检测相关2D和3D感知基础知识
大火的BEVFusion算法详解
讲明白了!端到端算法评估指标详解
多传感器标定的工具箱有哪些?
IROS2022最新 | 基于激光雷达的三维运动目标分割的高效时空信息融合
自动驾驶 3D LiDAR目标跟踪技术实现细节大揭秘!
港科大最新!Vista:高保真度、通用可控性的自动驾驶世界模型
端到端基础!绕不开的感知模块
从0到1!彻底搞懂BEVFormer算法原理
常考题!目标跟踪中如何定义最优关联匹配?
香港理工大学最新!Slamesh: 使用激光雷达传感器进行实时定位和网格划分
香港科技最新!Contour Context:3D激光雷达回环检测和度量姿态估计的抽象结构分布(ICLR2023)
UC伯克利最新!S3Gaussian:全球首个开源的自动驾驶场景3D GS工作
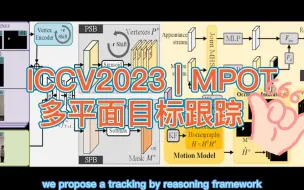
ICCV2023 | MPOT:多平面目标跟踪
Nerf+SLAM会擦出什么样的火花?
高精地图制作关键技术及领域主流方案分享-part1
【深信科创联合制作】仿真数据的一百种玩法 | 基于Carla传感器的仿真数据增强实战来了!
CVPR2024 | 逆天了!一统所有目标感知任务,目标感知基础模型GLEE
端到端算法是什么?自动驾驶领域是怎么做的?
MetaBEV:解决BEV检测和地图分割的传感器故障新方案
鱼眼相机和超声波雷达是怎么做融合的?
2022最新!基于激光雷达的3D目标检测综述(超全数据集和SOTA方法汇总)
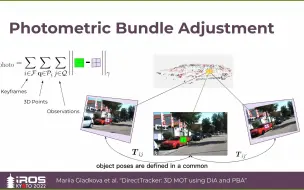
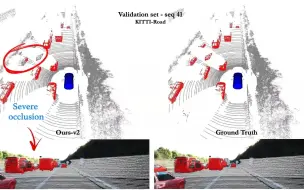
最新3D多目标跟踪方法DirectTracker:基于直接图像对齐和光度学束调整的3D多目标跟踪(IROS2022)
SemanticKITTI SOTA!激光雷达数据中的运动目标分割(IROS2022)
最新多传感器融合数据集!Hilti SLAM Challenge Dataset(RAL-IROS 2022)
浙江大学最新 | BEVPlace++:激光雷达全局定位方法,超越当前SOTA!泛化性能极佳
自动驾驶仿真框架CARLA教程(3):Car Agent强化学习环境
【地瓜创客孵化营】基于RDK X5的无人驾驶自行车视觉方案验证测试(后面会开源)
香港理工最新 !SLAMesh:激光雷达传感器的SLAM系统,实时构建和利用网格
多传感器融合!BEV感知融合算法介绍
没有BEV特征如何做BEV感知?(旷视团队分享PETRv2/StreamPETR/CMT等SOTA方案)
Lidar vs. Tesla:自动驾驶路线之争!激光雷达还是纯视觉?