V
主页
IROS2022 | 毫米波雷达和相机融合在高分辨率和远距离深度成像中的探索
发布人
公众号【自动驾驶之心】后台回复‘毫米波视觉融合’获取论文!本文寻求一种解决方案,用于从单个有利位置(例如杆式平台)在扩展范围(高达300米)上以高精度(几十厘米)对此类感兴趣目标进行深度成像。不幸的是,使用相机、激光雷达和雷达孤立进行深度成像的丰富文献难以满足现实条件下的这些严格要求。本文提出了Metamoran解决方案,该解决方案通过融合两种互补技术(毫米波雷达和相机)的优势,探索感兴趣目标的远程深度成像。与相机不同,毫米波雷达即使在很长的距离也能提供出色的厘米级深度分辨率。然而,它们的角分辨率至少比相机系统差10倍,融合这两种模式是很自然的,但在高杂波和远距离的场景中,雷达反射很弱,会出现伪影。Metamoran的核心贡献是利用相机图像的图像分割和单眼深度估计来帮助分离雷达并发现真实的物体反射。我们对Metamoran在400种不同场景中的深度成像能力进行了详细评估。评估表明,Metamoran估计的静止物体深度可达90米,移动物体深度可达305米,中值误差为28厘米,比原始雷达+相机基线提高了13倍,比单目深度估计提高了23倍。
打开封面
下载高清视频
观看高清视频
视频下载器
使用概率深度补全的3D激光雷达重建(IROS2022)
超详细的激光雷达相机标定教程!(Lidar-Camera)
超全干货 | 自动驾驶中的传感器融合:前融合+后融合+特征级融合(方法与策略)
聊一聊4D成像雷达在辅助驾驶领域的应用
【IROS2022】加速24%!RobotCore:ROS 2中硬件加速的开放架构
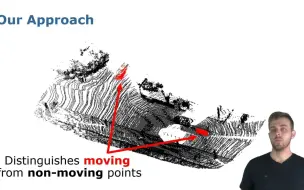
IROS2022最新 | 基于激光雷达的三维运动目标分割的高效时空信息融合
毫米波雷达量产实战!Radar是如何获取点云的?
太详细了!多传感器融合的策略和方法
ICRA2022 | 基于图的多传感器融合在自动施工机器人一致定位中的应用
SemanticKITTI SOTA!激光雷达数据中的运动目标分割(IROS2022)
自动驾驶中的多传感器融合都有哪些方法?基本流程都是什么?
大火的BEVFusion算法详解
自动驾驶多传感器数据融合(2):IMU和GPS的融合定位
自动驾驶多传感器数据融合(1):什么是多传感器融合?
实战超详细!Radar、Lidar和前置Camera的标定
鱼眼相机和超声波雷达是怎么做融合的?
多传感器标定的工具箱有哪些?
IROS2022最新思路 | RCA:自监督学习实现视觉导航(具有驾驶舒适性)
自动驾驶多传感器数据融合(4):多目标跟踪算法
CVPR2022 | SHIFT:当前自动驾驶最大的多任务合成数据集(雾天/雨天/雪天,检测、分割、深度图、实例分割、光流)
香港科技最新!Contour Context:3D激光雷达回环检测和度量姿态估计的抽象结构分布(ICLR2023)
多传感器融合!BEV感知融合算法介绍
IROS2022 | MIMOSA:针对传感器退化的多模态SLAM框架
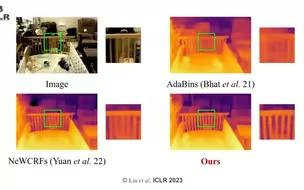
ICLR 2023 |VA-DepthNet:单目图像深度预测的变分方法
R3LIVE++:一个实时鲁棒的紧耦合激光雷达-惯性-视觉融合框架
使用YOLOv4完成激光雷达点云下的3D目标检测!
IROS2022 | 连续时间立体视觉惯性里程计
【CoRL2022】路径规划新SOTA!PlanT:通过目标级表示的可解释的规划Transformers
OmniDet:环视鱼眼多任务感知网络(深度估计、视觉里程计、语义和运动分割、目标检测和镜头污染检测)
关于自动驾驶的一切(层级划分/Lidar/Radar/视觉感知/AI与发展等)
高精地图制作关键技术及领域主流方案分享-part1
通过Intel Realsense 3D激光雷达完成SLAM任务!(性价比超高)
Lidar vs. Tesla:自动驾驶路线之争!激光雷达还是纯视觉?
【ECCV2022】SOTA!MeshLoc:基于网格的视觉定位
自动驾驶仿真框架CARLA教程(3):Car Agent强化学习环境
相机和激光雷达融合的多车辆跟踪demo
World Model!大火的世界模型到底是什么?
详解!基于Camera和基于激光雷达的自动驾驶系统区别!
2022最新!Nvidia完整阐释自动驾驶中的视觉感知(超赞技术)
浙江大学最新 | BEVPlace++:激光雷达全局定位方法,超越当前SOTA!泛化性能极佳