V
主页
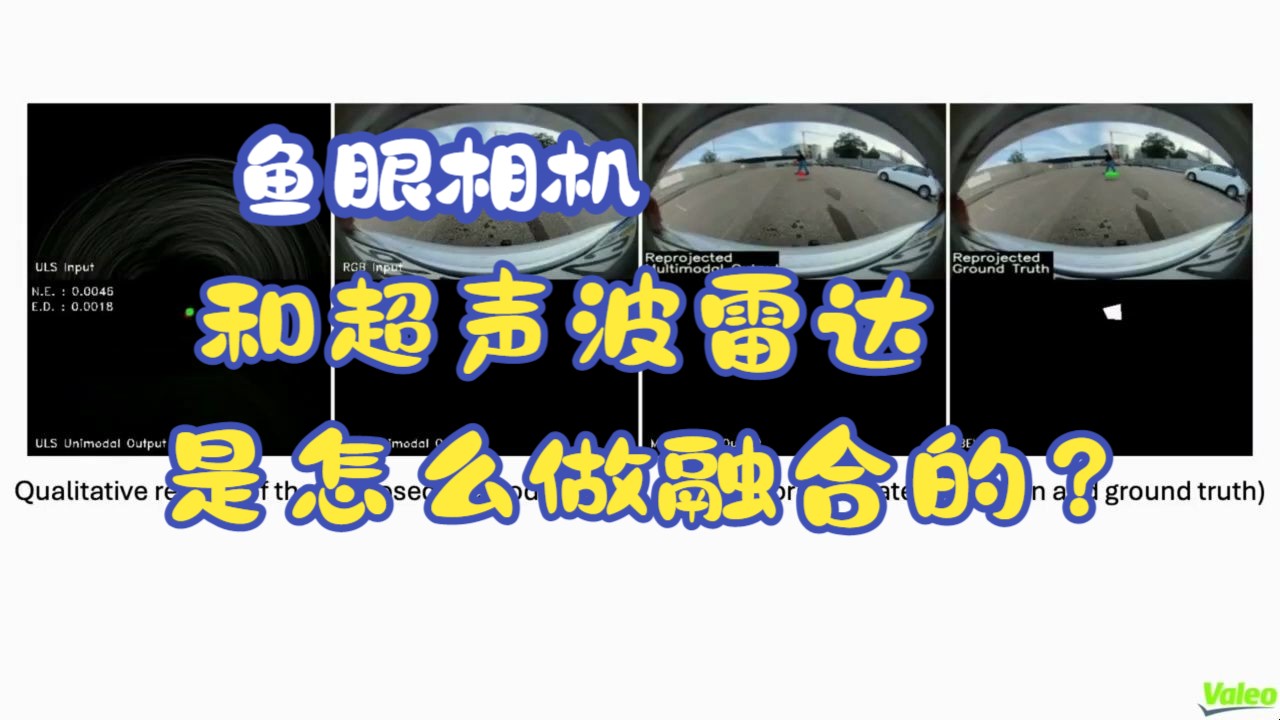
鱼眼相机和超声波雷达是怎么做融合的?
发布人
鱼眼相机与超声波传感器融合实现鸟瞰近场障碍物感知! 论文链接:https://arxiv.org/pdf/2402.00637.pdf 论文名称:Fisheye Camera and Ultrasonic Sensor Fusion For Near-Field Obstacle Perception in Bird's-Eye-View
打开封面
下载高清视频
观看高清视频
视频下载器
IROS2022 | 毫米波雷达和相机融合在高分辨率和远距离深度成像中的探索
醍醐灌顶!如何快速上手激光雷达-惯导标定?
地平线最新!DynStatF:用于激光雷达点云 3D 目标检测的高效特征融合策略
传感器标定精度如何验证?(Lidar/Camera/Radar/IMU/鱼眼相机)
毫米波雷达视觉到底是怎么融合的?CenterFusion你搞懂了吗?
传感器融合教程 Part 2 - 坐标变换(Coordinate Transformations)
多传感器标定的工具箱有哪些?
激光雷达3D目标检测算法有哪些?怎么分类的?
毫米波雷达视觉算法CRAFT,这次彻底理解了!
18.4M参数,实现SOTA!EFFOcc:一个基于高效融合的三维占用网络的最小基线(清华大学最新)
大火的BEVFusion算法详解
M-LIO:提升传感器信号丢失容忍度的多激光雷达和多IMU里程计
牛津大学IROS2023最新!激光雷达相机外参标定新算法(大幅降低误差)
搞懂了!原来激光雷达和相机的内外参是这样标定的
R3LIVE++:一个实时鲁棒的紧耦合激光雷达-惯性-视觉融合框架
看完缓解了我的技术焦虑!自动驾驶的产线标定以及标定间标定方法
低成本,但很惊艳,带16线激光雷达的自动机器人SLAM演示
自动驾驶多传感器数据融合(3):单目标跟踪算法
自动驾驶假数据效果逆天了!Panacea:如何生成全景可控BEV感知数据?
浙江大学最新 | BEVPlace++:激光雷达全局定位方法,超越当前SOTA!泛化性能极佳
香港理工大学最新!Slamesh: 使用激光雷达传感器进行实时定位和网格划分
看到了这个视频,彻底搞懂了PETR算法!
3D目标检测的数据标注/算法讲解/训练调优全系列闭环
GPT-4V与自动驾驶更配?GPT-4V在自动驾驶中的早期探索!
基于激光雷达的车道线检测实现
牛津大学 | IMU+Lidar+GNSS的多传感器融合用于机器人的精准定位!
自动驾驶中的多传感器融合都有哪些方法?基本流程都是什么?
超详细的激光雷达相机标定教程!(Lidar-Camera)
视觉3D检测如何做自动标注?
自动驾驶 3D LiDAR目标跟踪技术实现细节大揭秘!
Nerf+SLAM会擦出什么样的火花?
超详细!BEV感知算法的应用介绍
逆天了!新加坡国立最新 | 分割任意3D物体
ICCV 2023 | SparseFusion:基于稀疏表征融合的多模态3D新方案!
【IROS 2022】机器人超硬核点云配准方法:Linewise Non-Rigid Point Cloud Registration
使用概率深度补全的3D激光雷达重建(IROS2022)
速度快!MobileNeRF:移动端实时渲染方案,Nerf导出Mesh
在线高精地图 | TopoMLP:驱动拓扑推理的简单而强大的pipeline
自动驾驶仿真框架CARLA教程(3):Car Agent强化学习环境
自动驾驶中的激光雷达点云分割-part2