V
主页
A Feasibility-Driven Approach to Control-Limited DDP
发布人
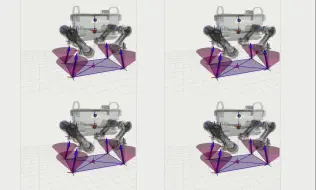
https://arxiv.org/abs/2010.00411 A Feasibility-Driven Approach to Control-Limited DDP Carlos Mastalli, Wolfgang Merkt, Josep Marti-Saumell, Henrique Ferrolho, Joan Sola, Nicolas Mansard, Sethu Vijayakumar Differential dynamic programming (DDP) is a direct single shooting method for trajectory optimization. Its efficiency derives from the exploitation of temporal structure (inherent to optimal control problems) and explicit roll-out/integration of the system dynamics. However, it suffers from numerical instability and, when compared to direct multiple shooting methods, it has limited initialization options (allows initialization of controls, but not of states) and lacks proper handling of control constraints. In this work, we tackle these issues with a feasibility-driven approach that regulates the dynamic feasibility during the numerical optimization and ensures control limits. Our feasibility search emulates the numerical resolution of a direct multiple shooting problem with only dynamics constraints. We show that our approach (named BOX-FDDP) has better numerical convergence than BOX-DDP+ (a single shooting method), and that its convergence rate and runtime performance are competitive with state-of-the-art direct transcription formulations solved using the interior point and active set algorithms available in KNITRO. We further show that BOX-FDDP decreases the dynamic feasibility error monotonically--as in state-of-the-art nonlinear programming algorithms. We demonstrate the benefits of our approach by generating complex and athletic motions for quadruped and humanoid robots. Finally, we highlight that BOX-FDDP is suitable for model predictive control in legged robots.
打开封面
下载高清视频
观看高清视频
视频下载器
人形机器人足底机械结构设计
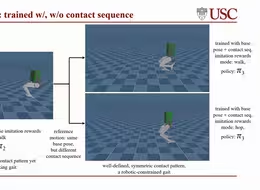
基于学习的多模式双足运动和隐式转换:一种多功能的策略方法
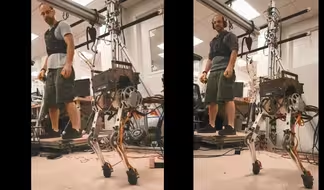
SCIENCE ROBOTICS: Dynamic locomotion synchronization via bilateral tele
How to design nonlinear MPC with deep learning prediction model
(Humanoid)An IntegratedForceSensitive, Impedance Controlled, Tendon-Driven Wrist
真牛!这个人形机器人吊打很多厂家的“产品”
qpSWIFT : A Real-time Sparse Quadratic Program Solver for Robotic Applications
人形机器人腿部机械结构设计 !很简单,有手就行!论文在简介
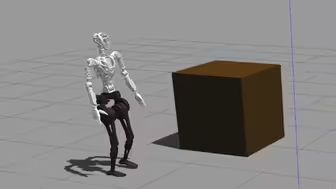
Bipedal Safe Navigation over Uncertain Rough Terrain
ETH最新论文 重新思考鲁棒性评估: 基于学习的四足运动控制的对抗性攻击
(IROS 2023) 浮动基座机器人本体感受外部力矩学习及其在类人运动中的应用
具有闭合/并行运动链的人形机器人的全身控制WBC:袋鼠案例研究
[IROS 2022] 四足机器人通过端到端学习运动和局部导航来掌握高级技能
EAGLE: The First Event Camera Dataset Gathered by an Agile Quadruped Robot
【通用】人形机器人RL策略Gazebo二次仿真框架
双足机器人步态生成 MATLAB and Simulink
Safety-Critical Control of Autonomous Systems -Aaron Ames
arxiv最新论文 基于学习的人形机器人离散地形上的通用和动态运动
(RA-L 23) Reactive Landing Controller for Quadruped Robots
(Humanoids 2023) Learning Safer Footstep Planning Policies for Legged Robots
Highly dynamic gaits controlled by a whole-body MPC
ETH 最新Science Robotics基于学习的轮腿机器人自主导航和运动
(T-RO 23) An Efficient Paradigm For Feasibility Guarantees For Legged Robots
(ICRA 2024)Contrastive Initial State Buffer for Reinforcement Learning
Centroidal Preview Control for Humanoid Multi-Contact Motion RA-L IROS 2022
TinyMPC model-predictive-control-on-resource-constrained-microcontrollers
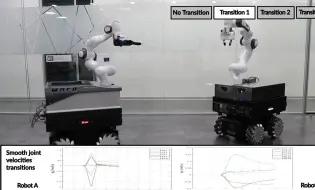
A Distributed Processing Approach for Smooth Task Transitioning in SHC
Meet the Futuristic Military Robot Dog
(ICRA 2024) Actor-Critic Model Predictive Control
Reinforcement learning for blind stair climbing with legged and wheeled robot
DTC: Deep Tracking Control 5
High-Power, Flexible, and Robust Musculoskeletal Hand (IROS 2017)
基于模型控制的人形机器人行走 MATLAB and Simulink
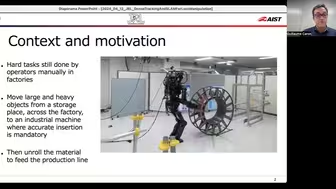
Inverse-Dynamics MPC via Nullspace Resolution (IROS'23 Presentation)
Boston Dynamics Stretch at MODEX 2024
强推!上海交大、腾讯、中国科学院三方强强联合的【python+机器学习+深度学习】系列课程,堪称人工智能系列课程的巅峰之作!-人工智能/深度学习/机器学习
Reinforcement Learning for Versatile, Dynamic, and Robust Bipedal Locomotion
Contact-Implicit MPC: Controlling Diverse Quadruped Motions Without Pre-Planned
适用于人形和四足的仿真器 The Simple Simulator 最新成果 去简介github 地址试用下吧
Humanoid Loco-Manipulations ... 3D Tracking and SLAM with Wide-Angle Depth-Image