V
主页
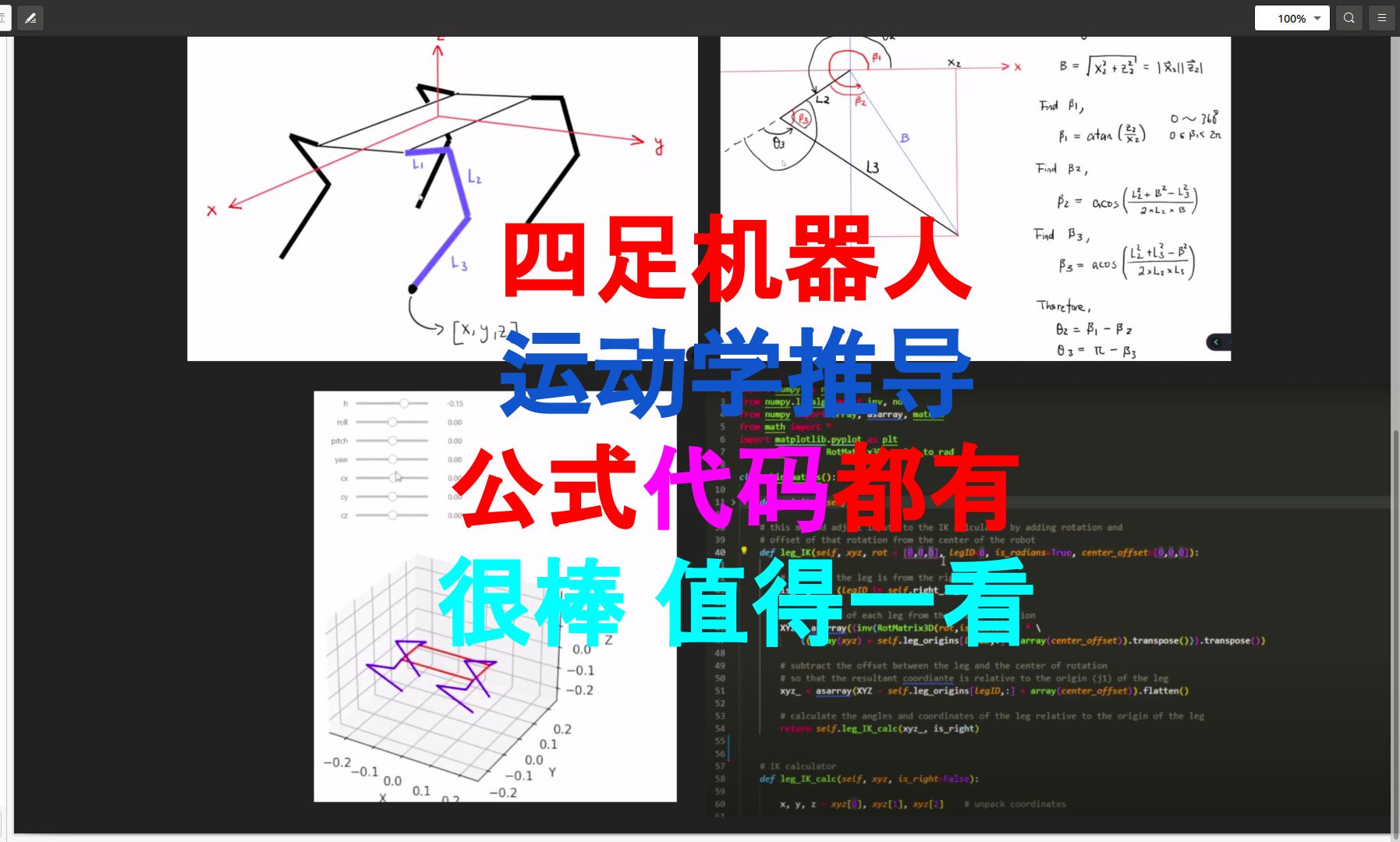
Part 2 - How to Solve Inverse Kinematics of a 4 Leg Robot
发布人
code link: https://github.com/engineerm-jp/Inverse_Kinematics_YouTube video from: https://www.youtube.com/@EngineerM Copyright ownership belongs to [https://www.youtube.com/@EngineerM]
打开封面
下载高清视频
观看高清视频
视频下载器
Part 3 (Final) - How to Solve Inverse Kinematics of a 4 Leg Robot
Part 1 - How to Solve Inverse Kinematics of a 4 Leg Robot
模型预测控制 (MPC) 从推导到C++ 实现,详细教程 仅使用 Eigen 库 代码在简介
ICRA 24 Convergent iLQR for Safe Trajectory Planning and Control of Legged Robot
(T-RO 24)Tube Acceleration:Robust Dexterous Throwing against Release Uncertainty
Inverse-Dynamics MPC via Nullspace Resolution (IROS'23 Presentation)
人形机器人足底机械结构设计
通过优化理论指导设计双足以达到控制和任务的最优
Meet the Futuristic Military Robot Dog
How to design nonlinear MPC with deep learning prediction model
Learning whole-body manipulation for quadrupedal robot
(submit to IROS 24) A Single-Leg Robot that Mimics the Human Leg and Toe
Model and data, two essential ingredients for controlling legged robot
solving the walking robot problem with reinforcement learning
SCIENCE ROBOTICS: Dynamic locomotion synchronization via bilateral tele
Deep Compliant Control for Legged Robots
Vision-Based Terrain-Aware Locomotion for Legged Robots ---T-RO
Bipedal Locomotion Reward Learning from Demonstrations via Inverse Reinforcement
MIT Robotics - Marco Hutter - Robots in the wild
Humanoid robot research result highlights in 2021
Reinforcement Learning for Versatile, Dynamic, and Robust Bipedal Locomotion
Conflict-based Model Predictive Control for Scalable Multi-Robot Motion Planning
有开源github代码! RA-L论文 人形机器人的多接触全身控制
The MIT Humanoid Robot Design Motion Planning and Control ForAcrobatic Behaviors
The legged robot whole-body State RVIZ plugin
SpotMini nimble robot by Boston Dynamics
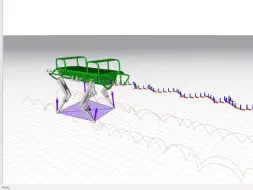
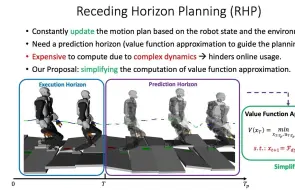
Online Multi-Contact Receding Horizon Planning via Value Function Approximation
High-Power, Flexible, and Robust Musculoskeletal Hand (IROS 2017)
EAGLE: The First Event Camera Dataset Gathered by an Agile Quadruped Robot
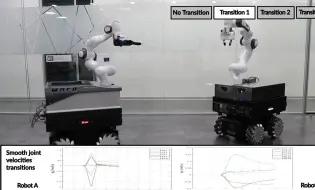
A Distributed Processing Approach for Smooth Task Transitioning in SHC
Pedipulate_ Enabling Manipulation Skills using a Quadruped Robot's Leg
Sampling based path replanning
Large-scale policy training for robots -Jemin Hwangbo (KAIST)
(T-RO 23) An Efficient Paradigm For Feasibility Guarantees For Legged Robots
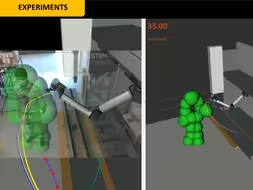
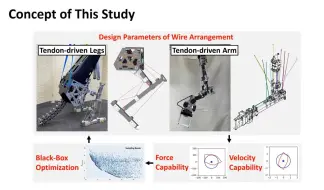
(RA-L 2024) Design Optimization of Wire Arrangement for Tendon-driven Robots
(RA-L 23) Reactive Landing Controller for Quadruped Robots
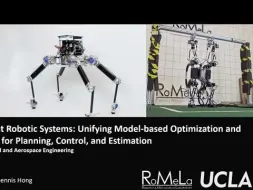
博士论文答辩 - Alexander Schperberg - 统一基于模型的优化和机器学习
what is a ROS2 service P10
Control is dead ?control+ learning才是未来
Combining Learning-Based Locomotion with Model-Based Manipulation for Legged